Download with AllDebrid
Download with AllDebrid
Download with AllDebrid
Download with AllDebrid

11/09/2015

!! Hola a todos !!
Por fin tendré más de tiempo para poder ayudaros en vuestras consultas sobre la construcción de un "2DOF" de la forma más sencilla y barata posible.
*************************************
Los links de las descargas ya están actualizados y operativos.

He añadido un canal TEAM SPEAK para usarlo entre todos. Así será más facíl poder solventar las dificultades que vayan surgiendo. Podeís usarlo cuando queraís.
SERVER :::: (Actualizando) ::::
20/01/2015

Un problema que nos podemos encontrar con los "potenciómetros" una vez instalados es que por más que intentemos eliminar esas pequeñas vibraciones no lo consigamos, aún incluso variando los valores que nos ofrece el programa XSIM o el Software de Prilad.-
Normalmente ese problema es originado por las denominadas "corrientes parasitarias" las cuales crean movimientos no deseados (vibraciones) de los motores al no tener la "señal" (patilla central del potenciómetro) una estabilidad correcta.

Podemos intentar solucionarlo/afinarlo instalando un "condensador" de unos 100 nanofaradios (100 nF). Necesitamos conectar la patilla central del potenciómetro (señal) y la patilla de tierra (GND) al condensador.-

Gracias a "PETAR2" por la aclaración.-
14/01/2015

Mumble es una aplicación gratuita multiplataforma libre de voz sobre IP especializada en la multiconferencia similar a Teamspeak o Ventrilo.
He creado un pequeño servidor usando "Mumble". Creo que así será más fácil intentar solucionar problemas concretos que de otra manera ( emails, foros ) sería mucho más pesado y lento. Yo estaré de vez en cuando conectado pero os invito a que lo uséis libremente y os ayudéis entre vosotros también. En la foto teneís los datos para la conexión.-
24/12/2014
He observado que mucha gente sufre "desconexiones" cuando usa el software X-SIM. De repente el simulador se detiene y apararece en Windows una ventana que le indica que ha surgido un "problema" y se ha cortado la conexión.
Pues ese problema puede quedar en la mayoría de los casos totalmente resuelto configurando la parte del software XSIM denominado "X-Sim Converter" tal y como muestra la siguiente fotografía.
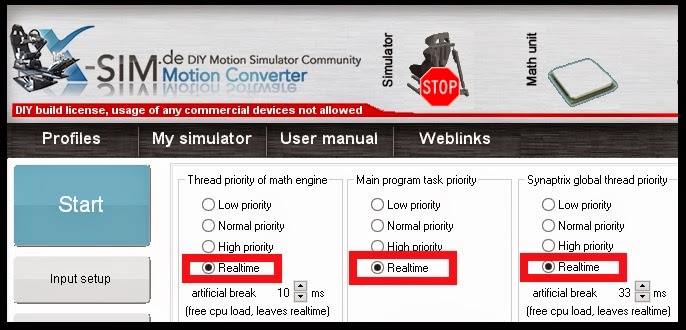
Debemos configurar la prioridad de ejecución lo más alta posible. Preferiblemente en "Realtime". Esto solucionará dichos errores de desconexión mientras jugamos. Un agradecimiento al compañero "Arbesu" por aportar la solución. :)
28/11/14
1. Mejorada la sección con mas detalles sobre la construcción del eje central del simulador usando diferentes métodos: el famoso eje de trasmisión "cardán" , un Silentblock y tensores que darán más estabilidad al cockpit si fuera necesario.-
2. He visto que mucha gente tiene problemas para introducir el Firm/código "PRILAD" a través del software "XLOADER 1.0". Cuando pulsamos"Upload" se congela la aplicación.
Con la herramienta "CodeBlocks-Arduino" será más sencillo y dará menos problemas.-

Nota: Herramienta facilitada por el compañero Javi G.
16/11/14
1. Los "Potenciómetros HALL" ya son totalmente operativos para usar tanto con PRILAD como con SIRNONAME y son fáciles de construir. Os dejo los componentes y métodos mas sencillos y efectivos por si teneis curiosidad.-
2. He revisado/actualizado como configurar el código/firm Sirnoname. También para que valen las configuraciones y apartados más importantes y así sea más fácil entenderlo. Por último he eliminado algunos errores.-
Un saludo! Y ánimo a todos! :)
P.D. Cualquier duda/sugerencia me la comentáis sin problemas.-


En primer lugar gracias por visitar mi blog en el cual intentaremos entre todos "fabricarnos" nuestro sencillo simulador (2dof) para ser usado tanto en juegos de conducción como en juegos de aviación.
Lista de juegos soportados: >Link<
La idea es gastar lo "mínimo indispensable" para tener buenos resultados aunque dejo a vuestra elección durante el proceso el ir "mejorando" con mejores materiales y terminaciones el simulador.-
Puntualizar que esta guía rápida aún no esta acabada y que quedan cosas que matizar y ampliar.
Destacar que no soy ni mucho menos un profesional de la electrónica ni
pretendo que sea la "guía definitiva" para fabricar un simulador con
motores eléctricos. Solo soy un aficionado a la electrónica, a los
simuladores y la Realidad Virtual que tanto nos gusta a todos. Entre
todos iremos viendo las dudas e iremos mejorando esta pequeña guía
rápida.
Me gustaría mencionar a una persona que me ha ayudado mucho en la construcción de los simuladores y utiliza el nick "Dualín" (dualin@gmail.com). Hace poco se ha registrado en la web Realovirtual.com y dentro de sus posibilidades también
intentará ayudar en todos los problemas y las dudas que os vayan
surgiendo. Él está actualmente fabricándose un simulador con 6 motores (6dof). Aunque eso ya es otra liga más adelante podríamos abordar ese proyecto si hay gente interesada.
También destacar el gran programa que ha hecho todo esto posible X-sim software y los Firmwares Arduino de "PRILAD" y "SIRNONAME. También la inestimable ayuda de algunos foreros de la sección en español/inglés de la web www.x-sim.de de los cuales he ido extrayendo algunas ideas, conceptos y aclaraciones que nos han venido muy bien para implementar en mi pequeña guía de iniciación para la fabricación de nuestro "2dof" de una forma clara, sencilla y amena para no llegar a desanimarse y finalmente desistir en el intento. Algunos de ellos (foro español) son "PSArias, Vicente34, Inferno, Merchane", "ssad84". También la ayuda de "jjdelalamo" ,"Franky"y "Petar2" del foro Realovirtual.com. En la seccion de sus respectivos foros los encontraréis y os podrán ayudar en todo lo que esten en sus manos de forma totalmente desinteresada.
Por último manifestar que espero que esta guía no sea un "contratiempo" para algunas personas que se
dedican de alguna manera profesionalmente a realizar por "encargo" estos tipos de
simuladores. No es mi intención.

 Es impresionante! No sientes el famoso mareo con el que se está asociando al Oculus Rift. Primeramente empecé a jugar con un "playseat" estático y el mareo era practicamente cero. Ahora con el simulador "2dof" engañas casi totalmente al cerebro y los mareos casi nunca llegan incluso en sesiones de hasta 3 horas que he probado. Es curioso como el posicionamiento absoluto ha ayudado muchísimo para ser usado en estos simuladores con movimiento. Ya lo probé en su día con mi DK1 y la experiencia fue pésima a no disponer de esta tecnología y la bajísima resolución. Ahora el cuento ha cambiado y la evolución del "mundillo del Simracing" es la "Realidad Virtual" ya que te hace sentir dentro del vehículo. Atrás quedará en cuanto empiecen a comercializarse en masa estos "artilugios" la instalación de triples monitores o grandes carrocerías simulando el coche real los cuales suponen grandes desembolsos.-
Es impresionante! No sientes el famoso mareo con el que se está asociando al Oculus Rift. Primeramente empecé a jugar con un "playseat" estático y el mareo era practicamente cero. Ahora con el simulador "2dof" engañas casi totalmente al cerebro y los mareos casi nunca llegan incluso en sesiones de hasta 3 horas que he probado. Es curioso como el posicionamiento absoluto ha ayudado muchísimo para ser usado en estos simuladores con movimiento. Ya lo probé en su día con mi DK1 y la experiencia fue pésima a no disponer de esta tecnología y la bajísima resolución. Ahora el cuento ha cambiado y la evolución del "mundillo del Simracing" es la "Realidad Virtual" ya que te hace sentir dentro del vehículo. Atrás quedará en cuanto empiecen a comercializarse en masa estos "artilugios" la instalación de triples monitores o grandes carrocerías simulando el coche real los cuales suponen grandes desembolsos.-
OCULUS RIFT + MOTION COCKPIT

Internet esta efectivamente plagada de "información" de como fabricarse un simulador de hasta seis motores incluso. Pero lo cierto es que la información es muy confusa, hay muchos tipos de circuitos electrónicos, no hay nada claro, muchos sistemas diferentes de cableados con errores o lagunas, casi todo en inglés y lo peor... cuando llevas 100 o 200 euros en roturas de componentes electrónicos al final como es lógico llega desesperación y abandonamos el proyecto.
 Como no quiero que os pase a vosotros (yo sin ir más lejos en su día estuve casi a punto de dejarlo ante tales dificultades) he intentado elegir, de entre varios métodos que conozco, los más sencillos y efectivos tanto en el apartado hardware como en el software. Otro objetivo mio en la guía será, como os he comentado anteriormente, ajustarme lo máximo posible en el dinero a invertir que aproximadamente serián unos 100€ la electrónica, estructura en madera y demás piezas (tornillos,escuadras..) unos 60€ , asiento (desguace) 50€, motores (2) 50€ el par y un volante "logitech" pongamos 100€. En total serían unos 360€ más o menos ya que depende de los precios que podáis conseguir. Yo creo que es un precio bastante asequible y tendremos un simulador con una buenas prestaciones. Podremos disfrutar de muchas horas de juego y con la satisfacción de haberlo hecho uno mismo.-
Como no quiero que os pase a vosotros (yo sin ir más lejos en su día estuve casi a punto de dejarlo ante tales dificultades) he intentado elegir, de entre varios métodos que conozco, los más sencillos y efectivos tanto en el apartado hardware como en el software. Otro objetivo mio en la guía será, como os he comentado anteriormente, ajustarme lo máximo posible en el dinero a invertir que aproximadamente serián unos 100€ la electrónica, estructura en madera y demás piezas (tornillos,escuadras..) unos 60€ , asiento (desguace) 50€, motores (2) 50€ el par y un volante "logitech" pongamos 100€. En total serían unos 360€ más o menos ya que depende de los precios que podáis conseguir. Yo creo que es un precio bastante asequible y tendremos un simulador con una buenas prestaciones. Podremos disfrutar de muchas horas de juego y con la satisfacción de haberlo hecho uno mismo.-
La guía es amplia ya que he intentado explicar las cosas lo máximo que podido pero no os asustéis. Id leyendo poco a poco y veréis que no es díficil. Lo importante es tener las "cuatro cosas" básicas claras como iremos viendo y os dareis cuenta que una vez "manos a la obra" es más practica que otra cosa.-

En internet existen numerosas empresas/webs que se dedican a la fabricación de estos "artilugios" con muy buenos acabados y que como no podría ser de otra manera nos ofrecen una muy buena experiencia. Pero su principal problema es que son extremadamente caros (+3000€), complejos y que ante cualquier rotura o imprevisto no seremos capaces de solventarlo y habrá que pasar por caja para repararlo.
Como no quiero que os pase a vosotros (yo sin ir más lejos en su día estuve casi a punto de dejarlo ante tales dificultades) he intentado elegir, de entre varios métodos que conozco, los más sencillos y efectivos tanto en el apartado hardware como en el software. Otro objetivo mio en la guía será, como os he comentado anteriormente, ajustarme lo máximo posible en el dinero a invertir que aproximadamente serián unos 100€ la electrónica, estructura en madera y demás piezas (tornillos,escuadras..) unos 60€ , asiento (desguace) 50€, motores (2) 50€ el par y un volante "logitech" pongamos 100€. En total serían unos 360€ más o menos ya que depende de los precios que podáis conseguir. Yo creo que es un precio bastante asequible y tendremos un simulador con una buenas prestaciones. Podremos disfrutar de muchas horas de juego y con la satisfacción de haberlo hecho uno mismo.-La guía es amplia ya que he intentado explicar las cosas lo máximo que podido pero no os asustéis. Id leyendo poco a poco y veréis que no es díficil. Lo importante es tener las "cuatro cosas" básicas claras como iremos viendo y os dareis cuenta que una vez "manos a la obra" es más practica que otra cosa.-
En internet existen numerosas empresas/webs que se dedican a la fabricación de estos "artilugios" con muy buenos acabados y que como no podría ser de otra manera nos ofrecen una muy buena experiencia. Pero su principal problema es que son extremadamente caros (+3000€), complejos y que ante cualquier rotura o imprevisto no seremos capaces de solventarlo y habrá que pasar por caja para repararlo.

En los comercios tenemos como opciones más sencillas y baratas para los que no nos podemos permitir gastarnos tanto, los famosos "Playseat estáticos", que están formados por una estructura sin ningún tipo de movimiento.
_l.jpg)


A estos simuladores o incluso al sillón de tu escritorio se les puede agregar un "aparato" que en resúmen se acopla a la estructura (generalmente al asiento) y le otorga cierta vibración. Es algo similar la vibración que produce un "mando de una videoconsola". El efecto de vibración no está mal y está muy consegido pero uno siente que falta algo más de realismo. También cabe la posibilidad de si ya dispones de un "buttkicker" o similar anexarlo al "2dof".-


Buttkicker Gamer 2 (180€)
Ahora llegamos a los simuladores "motorizados" los cuales son los que ofrecen un mayor realismo pero como hemos dicho anteriormente tienen unos precios muy altos no aptos para todos los bolsillos o que simplemente para jugar de vez en cuando no queremos gastar tanto dinero.-
Motion Pro II Racing Simulator
EL TOP DE LOS SIMULADORES (2DOF)

49.000$
Existen "kits" mas o menos "caseros" para fabricarse un Coppick/simulador parecido al anterior expuesto pero volvemos a lo mismo, siguen siendo extremadamente caros. Para que os tengáis una idea solo los "brazos de movimiento" los llamados actuadores SCN5/SCN6 o similares valen nuevos cerca de 1.000€ cada uno ya que además del "brazo" necesitamos unos circuitos especiales para ellos. Por lo tanto os podéis hacer una idea de lo que puede valer todo el conjunto. Ademas el software para controlar todo el sistema suele ser de pago también.


Otro sistema algo más es usando servomotores industriales.-

Rondan los 500/600 euros la unidad
"EJEMPLO DE DISEÑO 2DOF CON SERVO-MOTORES"
En resúmen como veis son diseños bastante espectaculares pero un "capricho" al alcance de muy pocos por el sobre coste de los motores usados (Actuadores ó Servomotores industriales) .
Por lo tanto son caros, complejos y al fin y al cabo las sensaciones serán muy parecidas a los modelos que nos fabricaremos nosotros mismos aunque a simple vista parezca que no. Y lo más importante, invirtiendo una cantidad de dinero razonable para poder "jugar" unos buenos ratos.
Por lo tanto son caros, complejos y al fin y al cabo las sensaciones serán muy parecidas a los modelos que nos fabricaremos nosotros mismos aunque a simple vista parezca que no. Y lo más importante, invirtiendo una cantidad de dinero razonable para poder "jugar" unos buenos ratos.
Resúmen del tipo de sistemas más comunmente utilizados en simulación
GRADOS DE LIBERTAD (DOF)
Los grados de libertad también llamados DOF por sus
siglas en ingles (degree of freedom) hacen referencia al número de
movimientos independientes que se pueden realizar. En otras palabras, un
grado de libertad es la capacidad de moverse a los largo de un eje
(movimiento lineal) o de rotar a lo largo de un eje (movimiento
rotacional). Por ejemplo, un automóvil posee 3 grados de libertad, dos
de posición y uno de orientación.
Sistemas con 2DOF: Cambios de dirección a alta velocidad, baches, bordillos, pianos, derrapes.
Sistemas con 3DOF: Además de los anteriores, perdidas de tracción, subvirajes, sobrevirajes. Sistemas con 6DOF: Además de los anteriores, aceleración, frenada, fuerzas G laterales y frontales, saltos, deceleraciones bruscas, impactos.
Sistemas con 3DOF: Además de los anteriores, perdidas de tracción, subvirajes, sobrevirajes. Sistemas con 6DOF: Además de los anteriores, aceleración, frenada, fuerzas G laterales y frontales, saltos, deceleraciones bruscas, impactos.

Ejemplo del sistema 6DOF
Parece claro que, con independencia de que los simuladores 2DOF y 3DOF,
pueden cumplir sobradamente con la misión de transmitir
la gran mayoría de las sensaciones que tenemos al volante de un vehículo
de competición, y constituyen un enorme salto desde un cockpit
estático, el hecho de tener 6DOf, va a hacer que las sensaciones sean
mucho mas reales (digamos más puras) y se correspondan más exactamente,
debido a los grados de libertad que tenemos, y a la posibilidad de
combinaciones de los mismos, con las que se tienen en un vehículo real
de competición. Pero lamentablemente es la opción más cara ya que aún usando motores 12v/24v DC en vez de actuadores SCN5/6 hidráulicos solo en "piezas electrónicas" son más de 1.000 euros lo que hay que invertir.
Nuestro "2dof" casero
Bueno ahora vamos a ir entrando en materia. El diseño que voy a presentar es lo más sencillo y barato posible. Yo os daré los pasos a seguir y vosotros sobre la marcha si lo veis oportuno vais eligiendo los materiales (alumino, hierro o madera), mejoras y terminaciones que más os guste. Lo importante es tener clara la electrónica ya que como he dicho la estructura es más bien al "gusto del consumidor" y la posibilidad de tener a mano herramientas y lugar amplio de trabajo para hacer cortes y soldaduras. En este sencillo tutorial lo haremos de madera y en otro tutorial más adelante podríamos ver el tema de uno metálico.
"Un diseño limpio y muy efectivo si nuestra idea es realizar el proyecto en metal"

"Un diseño limpio y muy efectivo si nuestra idea es realizar el proyecto en metal"

DE METAL REGULABLES

Más diseños:


Modelos
1. Por tipo de estructura:
Hay que tener en cuenta que principalmente existen dos estilos: Uno con toda la estructura en movimiento y otra con solo el "asiento". En una primera valoración podremos pensar que será mejor que se mueva toda la estructura pero a continuación veremos como puede ser más real que solo se "mueva" la parte del asiento como el modelo comercial "Motion Pro 2 Racing Simulator" de la empresa www.cxcsimulations.com.-
Fuerzas laterales:

ASIENTO SOLO

VIDA REAL

COCKPIT ENTERO
Nota: como podéis observar este último movimiento quizá es el menos realista a mi parecer teniendo en cuenta las fuerzas que se ejercerían de forma natural dentro de un vehículo. Aunque si lo que buscamos es "simulación de naves/aviación" quizá no sea mala idea. Ambas elecciones según gustos pueden ser buenas.
Fuerzas longitudinales:

ASIENTO SOLO

VIDA REAL

COCKPIT ENTERO
Nota: De nuevo vemos como con toda la estrutura en movimiento el efecto que produce es más bien de "péndulo".
Una vez visto esto estos detalles del movimiento del simulador la elección final es personal aunque como he dicho anteriormente ambos modelos son válidos.-
2. Por modo de empuje:
Aquí tendremos en cuenta los dos sistemas por los cuales los motores ayudados de dos barras ejercerán su empuje a la estructura para crear el movimiento.
Fuerzas aplicadas desde la parte superior de la estructura
En estos vídeos de ejemplo lo veremos con más detalle, pero ya os digo de antemano que es la mejor opción y la que más realista queda (aplicando la fuerza directamente a la espalada). De todas formas la de incluir todo en la parte baja como veréis en el segundo video no es muy valida ya que se consiguen unos resultados muy buenos además de ahorrar mucho en espacio. Ideal para pisos/habitaciones reducidas.-
PARTE SUPERIOR
Es importante buscar este esquema de "inclinaciones" cuando instalemos los motores, las barras y el "asiento".-

Fuerzas aplicadas desde la parte inferior de la estructura
((Ejemplos))
((Ejemplos))
PARTE INFERIOR

Vamos hacer un inventario de los componentes que necesitaremos para poder tener lista la parte electrónica del simulador "2DOF".
Una controladora "Arduino Uno" Revisión 3. En esencia lo que nos interesa saber es que su función será "recoger" la telemetría del videojuego ( extraída por un software especial que veremos y configuraremos más adelante) y "trasformarla" para que podamos usarla para producir un movimiento controlado de los motores eléctricos.
A lo que nosotros nos importa es que posee puertos de entrada y de salida digitales/analógicos los cuales utilizaremos para "cablear", una entrada USB para enlazar con nuestro PC y que a su vez le vale de alimentación.
El botón "ROJO" es el reset de la controladora que durante la configuración a veces deberemos pulsar.

Detalle de las partes de la controladora Arduino UNO
Nota: aunque la que vemos en la foto no es la "vers. Revisión 3" en esencia es practicamente igual para el uso que le vamos a dar. Lo importante de ver en esta foto son la organización de los pines (analogicos y digitales), conector USB, el botón reset y las entradas de de 5V y tierra (GND).-

La version que tenemos en la siguiente foto es la del 2014 que a fectos prácticos para nuestro proyecto es indiferente tener la versión 2012/2014.
Ahora mismo (Sep2014) está en este distribuidor (EBAY) a 5€ la unidad.-

SUGERENCIA DE LUGAR DE COMPRA
DRIVERS OFICIALES Y COMPATIBILIDAD CON LA ARDUINO "CHINA"

DRIVERS OFICIALES Y COMPATIBILIDAD CON LA ARDUINO "CHINA"
Tanto si la placa Arduino Uno es original o si es "China" el software que indico seguidamente hay que instalarlo en nuestro PC.-
Arduino 1.0.6 - Software OFICIAL.-
Download
Arduino 1.0.6 (release notes):
NOTA:
Si tenéis problemas en el reconocimiento del USB/PORT-ARDUINO UNO con estos fabricantes "chinos", la solución es sencilla, seguid estos pasos para descargar sus drivers.
Por lo tanto a parte de instalar el software oficial Arduino debemos descargar sus drivers propios.-
Normalmente el error de estas Arduino Uno "chinas"nos da la cara al cargar algún código/firm. Eso es que aunque WINDOWS detecta la Arduino Uno "china" no lo ha hecho correctamente.-
Ejemplo:
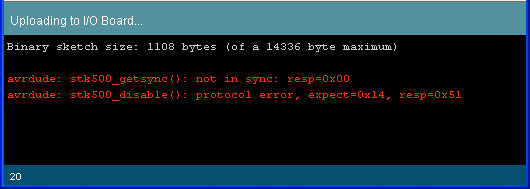
| !SOLUCIÓN SENCILLA! |
ENLACE AL TUTORIAL DE FOTOS - DRIVERS CHINOS
En el link está la descarga y los pasos a seguir para su instalación paso a paso con fotos. Así solucionaremos el problema y nos dejará introducir los codigos en nuestra Arduino UNO china sin problemas.-

Una "SparkFun - Monster Moto Shield" esta placa permite utilizar hasta dos motores de corriente continua con un margen bastante bueno de amperaje para que los motores "muevan" todo el peso del simulador sin problemas. Aunque como veremos más adelante no necesitarán soportar realmente todo el peso al disponer el simulador de "un eje central" bajo nuestro asiento.-


Como podéis observar en la primera foto la placa suele venir de casa "pelada" solo circuito. Para facilitar la tarea de cablear es recomendable que la compréis con el kit que os muestro. Este kit lleva todo lo necesario para cablear con facilidad a parte de contar con unos pequeños disipadores que seran "imprescindibles" si no queremos que se nos queme. De todas formas a parte de estos disipadores instalaremos un pequeño disipador/ventilador para tenerlo bien refrigerado.-
Nota: No os precupéis si no tenéis para soldar. En cualquier tienda de electrónica le dejáis el kit y por 2 o 3 euros os sueldan todos los componentes.
Cableado para usar en los enlaces: Aquí usaremos los típicos de los "Kits Arduino" que hay de venta por internet ya que no necesitan soldaduras y son muy sencillos de ir conectando y además son muy baratos.
Alternativas:
ICSJ012A Monster Moto Shield
También muy barata e idéntica en configuración y especificaciones técnicas a la anteriormente citada.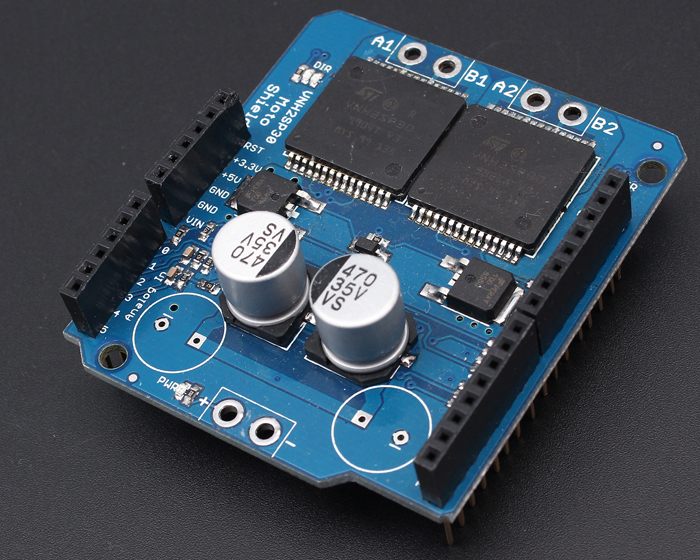
IMPORTANTE: LA REFRIGERACION DE LOS PUENTE-H MONSTER.-
Es importante destacar que estos circuitos cuando se les exige rendimiento suben mucho de temperatura por lo tanto debemos ser precabidos y tenemos que instalarles un sistema para que no lleguen a sobracalentarse y dañarse. Arriba he indicado un kit que viene con todo. Si elegimos la "version" básica tenemos que instalarselo nosotros. Podemos comprar un pequeño disipador pasivo de aluminio y con una sierra lo cortamos a medida o llevarnos la monster a la tienda y ver si tienen alguno que pueda valer y asi nos ahorramos los cortes. Usamos el mismo producto que para instalar las CPUs.
EJEMPLO:


{kind=link}

NOTA IMPORTANTE
Como todo los tipos de componentes electrónicos pueden salir defectuosos de fábrica y para evitar calentamientos de cabeza y posibles frustraciones innecesarias tanto el puente "MONSTER" como seguidamente a los "Puentes I-BT2" deberemos hacerles unos test nada mas lleguen a nuestras manos. Así estaremos seguros al 100% que el hardware está en condiciones. Evitaremos como digo horas y horas de no entender que está fallando en el sistema y porque los motores no responden debidamente a las ordenes del software. Estos fallos de fábrica no son generalizados pero es importante detectarlos rapidamente.
TEST MONSTER (ZOOM)

Ejemplo:
MOTOR 1. Unimos el pin D5 de la "Monster" al positivo (5v) y su pin D7 también al positivo (5v) verificamos con un multímetro que efectivamente arroja un resultado del +12v/12v indistintamente en la salida A1B1. Luego veremos que al usar los pines D5 y D8 el resultado debe darnos su sentido opuesto.
Un error "algo común" es que una de las cuatro combinaciones arroje un volaje nulo (cero) o que no llegue al maximo de lo que tiene que dar. Por ejemplo 9v.
Tendríamos ante nosotros una pieza defectuosa de fábrica.
Seguidamente echaremos un vistazo a otro modelo asequible de Puentes H para arduino, sus características y la manera de realizarle un test para comprobar que esta perfecto de fábrica.
Alternativas a los Puentes-H "MONSTER"
Bien anteriormente he señalado las famosas "monster Moto Shield" pero su rango de voltaje asciende hasta los 16v que está muy bien. Lo importante como os he dicho es que este bien refrigeradas "con los disipadores" y aparte un pequeño ventilador estilo "PC" para que la temperatura este aún más controlada.
Os presento a los IBT-2 , son también PUENTES-H como la "monster" pero tiene la particularidad de que es compatible desde los 6V hasta los 27V. Su máximo amperaje asciende hasta los 43A. El voltaje interno para los potenciómetros oscila desde los 3.3V hasta los 5V.
Cada uno de los IBT-2 solo puede manejar un motor. Al contrario que la monster que es capaz de en un solo circuito controlar ambos motores de un 2DOF. Por lo tanto deberemos adquirir dos componentes. Rondan los 10/12€ cada uno.
Al llegar hasta los 27V es una opción para la gente que quiere optar por poner una fuente de alimentacion a su simulador de 24V.
Estos PUENTES-H llevan incorporado en su parte trasera un gran disipador pasivo por lo tanto no es necesario instalarles nada más. Simplemente como en la "monster" un pequeño ventilador.
Tanto las "MONSTERs" como los" IBT-2" son buenas elecciones para motores de 12V.-


TEST DE COMPROBACION HARDWARE PARA EL PUENTE I-BT2

VENTILADOR/DISIPADOR


CABLES ALARGADORES/EXTENSORES (HEMBRA-HEMBRA)

CABLES ALARGADORES/EXTENSORES (HEMBRA-MACHO)

CABLES DE ENLACE (MACHO-MACHO)
Un Cable Usb 2.0 AM/BM para la conexión del la placa arduino con el PC. Intentad que no sea excesivamente largo ya que podría dar problemas al no llegarle la información de forma correcta al arduino originando errores en el movimiento (ruidos eléctricos) o directamente no ser reconocida por el PC de forma súbita, osea, que a veces la reconoce y de repente ahora no. De todas formas a las malas habrían varias soluciones al problema. Pero es un problema raro solo pasa con cables muy largos y de muy mala calidad.-

La fuente de alimentación
En la fuente de alimentación no podemos escatimar y más si decidimos construir el 2DOF con tipo de estructura completo (asiento+pedales+volante+tv). Una buena elección seria la Nox Urano VX 750W con llegada del raíl de "12v hasta los 62 Amperios" si fueran necesarios. Osea que tendremos margen. También son muy recomendables fuentes de alimentación de servidores HP las cuales de segundamano suelen estar baratas y poseen una calidad en sus circuitos internos excelente.-

En esta pequeña foto vemos como preparar la fuente de alimentación para que inicie aunque no detecte una placa base. Hay que puentear esas dos salidas.-
En esta pequeña foto vemos como preparar la fuente de alimentación para que inicie aunque no detecte una placa base. Hay que puentear esas dos salidas.-
Nox Urano VX 750W
** +3.3V - 25A / +5V - 25A / +12V - 62A / -12V - 0.5A / +5VSB - 3.0A **
** +3.3V - 25A / +5V - 25A / +12V - 62A / -12V - 0.5A / +5VSB - 3.0A **

ALTERNATIVAS A FUENTES DE PC
FUENTES DE SERVIDORES HP - POTENTES Y DURADERAS
Existen muchos modelos pero elegiremos los que desarrollen cierta potencia de amperaje.
MODELO HP DPS-700GB A

12 Voltios / 56 Amperios
Estas fuentes de alimentación suelen tener este aspecto y necesitan ser "puenteadas" para que enciendan. Es sencillo pero cada modelo tiene su manera. Este modelo en concreto tiene una gran potencia y actualmente se puede conseguir más barata que otras de su clase más modestas al ser menos conocida.
Estas fuentes de alimentación suelen tener este aspecto y necesitan ser "puenteadas" para que enciendan. Es sencillo pero cada modelo tiene su manera. Este modelo en concreto tiene una gran potencia y actualmente se puede conseguir más barata que otras de su clase más modestas al ser menos conocida.


Detalle del puente: vemos puenteado los 3 pines y además preparado el positivo y negativo a 12v. Posee dos salidas, una a la izquierda y otra a la derecha. En la foto solo ha usado una.
Esta fuente ronda de 2 mano los 30/45 euros por internet. Mayormente son de alemania los vendedores.
MODELO HP DPS-600PB

12voltios /47 Amperios
CONFIGURACION DE PUENTEO
CARACTERÍSTICAS TÉCNICAS

DESMONTAJE

LOCALIZACIÓN DE LOS PINES


Tenemos en total 12 pines (3x4). Nos interesa unir los pines tal como indica la foto (pines 6,8 y10). Si unimos el número 4 (color naranja) al conjunto conseguiremos que el disipador que incorpora la unidad baje su velocidad al mínimo para que no sea tan ruidosa.
TERMINALES TIPO "FASTON"

SUGERENCIA DE LUGAR DE COMPRA (32€)
DOBLE POTENCIA PARA MOTORES DE 24V
Unión en "serie" del modelo DPS-600PB
 Potencia de salida en serie: 1150W a 24V y 47Amp
Potencia de salida en serie: 1150W a 24V y 47Amp
SUGERENCIA DE LUGAR DE COMPRA- DOS FUENTES
(LOS GASTOS DE ENVIO SUELEN SER ENTRE 15/17 EUROS)
**********************
El video aunque este en inglés es sencillo seguirle el hilo así lo entendereis con facilidad los pasos
CONFIGURAR LAS DOS FUENTES EN SERIE
 Paso 1 . Desmontar la unidad como indica el video y "Aislar de masa el circuito" así evitaremos posibles cortocircuitos entre ambas fuentes de alimentación. Usaremos una silicona plástica o similar.
Paso 1 . Desmontar la unidad como indica el video y "Aislar de masa el circuito" así evitaremos posibles cortocircuitos entre ambas fuentes de alimentación. Usaremos una silicona plástica o similar.



Este tipo de cables son muy recomendados para facilitar la conexion de los pines.

Las dos fuentes DPS-600PB en serie con salida lista a 24V.-
MAS FUENTES DE ALIMENTACION
EBAY - LINK
GROSOR DEL CABLEADO DE ALIMENTACION


Cuando llevo un rato bueno con el simulador y dándole mucha caña he comprobado que algo si se calienta "el cableado" pero sin peligro. Lo que si se calientan son los motores. Es importante que no alcancen temperaturas muy altas o se quemarán. He leído ya varios casos de motores quemados. Sobre todo motores "malos" y moviendo toda la estructura de mala manera y con "bielas" excesivamente largas.
 En realidad podría hacerse pasar más corriente que la mencionada con las secciones expuestas en las tablas , pero se corre el riesgo de que se caliente el conductor en
exceso (y se puede prender fuego) y además puede haber pérdida de
voltaje. Como sabéis a menor seccion, mayor es la resistencia y mayores
las perdidas (calor). Pero con un "2DOF" y sobre todo moviendo solo el
"asiento" pienso que la carga no debería ser tan alta como para
quemarlos.-
En realidad podría hacerse pasar más corriente que la mencionada con las secciones expuestas en las tablas , pero se corre el riesgo de que se caliente el conductor en
exceso (y se puede prender fuego) y además puede haber pérdida de
voltaje. Como sabéis a menor seccion, mayor es la resistencia y mayores
las perdidas (calor). Pero con un "2DOF" y sobre todo moviendo solo el
"asiento" pienso que la carga no debería ser tan alta como para
quemarlos.-
En un simulador a 12v nos podría quedar así. Dependiendo de la
velocidad que exiga el "juego en ese instante" y de la amplitud de la
biela instalada.
 90 W por motor de media -----------> 7,5 A x 12V DC
90 W por motor de media -----------> 7,5 A x 12V DC
200W en total aprox.


POTENCIÓMETROS
12voltios /47 Amperios
CONFIGURACION DE PUENTEO
CARACTERÍSTICAS TÉCNICAS

DESMONTAJE

LOCALIZACIÓN DE LOS PINES

{kind=link}
TERMINALES TIPO "FASTON"
FINALIZACION Y CABLEADO
SUGERENCIA DE LUGAR DE COMPRA (32€)
DOBLE POTENCIA PARA MOTORES DE 24V
Unión en "serie" del modelo DPS-600PB
SUGERENCIA DE LUGAR DE COMPRA- DOS FUENTES
(LOS GASTOS DE ENVIO SUELEN SER ENTRE 15/17 EUROS)
**********************
El video aunque este en inglés es sencillo seguirle el hilo así lo entendereis con facilidad los pasos
CONFIGURAR LAS DOS FUENTES EN SERIE


Paso 2. El paso es idéntico al anterior pero esta vez tenemos que hacerselo a las dos fuentes logicamente.
Tenemos en total 12 pines (3x4). Nos interesa unir los pines tal como indica la foto (pines 6,8 y10). Si unimos el número 4
(color naranja) al conjunto conseguiremos que el disipador que
incorpora la unidad baje su velocidad al mínimo para que no sea tan
ruidosa.
Este tipo de cables son muy recomendados para facilitar la conexion de los pines.

Las dos fuentes DPS-600PB en serie con salida lista a 24V.-
MAS FUENTES DE ALIMENTACION
EBAY - LINK
GROSOR DEL CABLEADO DE ALIMENTACION
Yo personalmente estoy usando cables de 2,5 mm2 de sección que rondan sobre los 15/16/17 Amperios perfectamente todo el
verano sin problemas.-
LIMITES TEORICOS DE SEGURIDAD

Cuando llevo un rato bueno con el simulador y dándole mucha caña he comprobado que algo si se calienta "el cableado" pero sin peligro. Lo que si se calientan son los motores. Es importante que no alcancen temperaturas muy altas o se quemarán. He leído ya varios casos de motores quemados. Sobre todo motores "malos" y moviendo toda la estructura de mala manera y con "bielas" excesivamente largas.
200W en total aprox.
POTENCIÓMETROS
Los potenciómetros rotatorios: En esencia son resistencias. Los potenciómetros limitan el paso de la corriente eléctrica
(Intensidad) provocando una caída de tensión en ellos al igual que en una
resistencia, pero en este caso el valor de la corriente y la
tensión en el potenciómetro las podemos variar solo con cambiar el valor de
su resistencia. En una resistencia fija estos valores serían siempre los
mismos.
A nosotros lo que nos importa es para que
sirve. Pues bien, en nuestro simulador (2DOF) su función será indicar al
la "placa controladora arduino" en que ángulo de giro esta el motor:
Osea, así sabrá la posición de giro del motor y según la telemetría del
"juego" subirá o bajará las barras que ejercen el movimiento al
"sillón-simulador". Si no instalamos los potenciómetros los motores
girarían sin control.
Características que deben tener: Que sea "cermet" (metálico), de resistencia lineal ( no logarítmico ) y de 10 Kohm.
/// El motivo por no usar de plástico es que como tiene que rotar a la
par del motor con su uso continuado empiezan muy pronto a tener
"problemas". Llega un momento que no indican bien a la placa arduino el
ángulo de los motores y se producen movimientos que no concuerdan con lo
que "pasa en el juego" para entendernos.-



Nota: los pines A y C (conectaremos el POSITIVO/NEGATIVO a 5V indistintamente ya que las resistencias no tienen polaridad) . Del pin B sale la información (ángulo de giro) del potenciómetro que será usada por el arduino.
*********************************************************
POTENCIOMETROS MAGNETICOS

Como sé que hay gente que le gustaría entretenerse en cambiar sus
"potenciómetros clásicos" ( mecánicos y con desgaste a la larga) por
unos "Encoders" con efecto Hall basados en las fuerzas magnéticas os voy
a enseñar un sencillo Video-Test donde con una serie de componentes
puedo lograr controlar un servo. También serviría para los motores del
"2dof" una vez bien configurado. En el foro XSIM hay algo de información
sobre el tema. De todas formas os enseño lo importante y lo que
funciona. Agradecer también las indicaciones de DUALIN que es un maestro
es estos temas.-
Los dos sensores "estrella" son principalmente los SS495A y SS495A1 ( el A1 aún más sensible). Por lo visto ambos son útiles. Otros modelos... como los "HALL A3144" y similares ( más baratos ) me ha sido imposible "domarlos". Apenas tienen sensibilidad. O detectan la presencia del campo magnético al 100% o en cuanto baja la intensidad pasan a 0% de señal.-
Tanto para los potenciómetros mecánicos como para los magnéticos (HALL) es recomendable usar un condensador de 100 nF para eliminar las "corrientes parasitarias" en la señal ya que pueden originar movimientos involuntarios de los motores.-
Los dos sensores "estrella" son principalmente los SS495A y SS495A1 ( el A1 aún más sensible). Por lo visto ambos son útiles. Otros modelos... como los "HALL A3144" y similares ( más baratos ) me ha sido imposible "domarlos". Apenas tienen sensibilidad. O detectan la presencia del campo magnético al 100% o en cuanto baja la intensidad pasan a 0% de señal.-
Tanto para los potenciómetros mecánicos como para los magnéticos (HALL) es recomendable usar un condensador de 100 nF para eliminar las "corrientes parasitarias" en la señal ya que pueden originar movimientos involuntarios de los motores.-
A "groso modo" podemos ver como interactúa el sensor "SS495A1"
con dos imanes de neodimio enfrentados (si los acercaramos se unen.. no se repelen) en una cápsula de plástico. El
servo motor "vibra un poco" al hacerlo a pulso la rotación de la cápsula
y al no respetar una distancia equidistante de sendos imanes con
respecto al sensor... pero para "la prueba" creo que vale.
Características técnicas del SENSOR- PDF (http://doc.chipfind.ru/pdf/honeywell/ss495a1.pdf)
- Arduino NANO
- SERVO MOTOR 5v
- Un simple tapón de bolígrafo.-
- Dos imanes de neodimio enfrentados (extraídos de un lector de DVD averiado).-
- SERVO MOTOR 5v
- Un simple tapón de bolígrafo.-
- Dos imanes de neodimio enfrentados (extraídos de un lector de DVD averiado).-

DIFERENTES METODOS DE CONSTRUCCION DE POTENCIOMETROS HALL / MAGNETICOS
LA PRINCIPAL VENTAJA ES QUE NO TIENEN ROZAMIENTO Y POR LO TANTO SON MUCHO MAS DURADEROS.-
****************************************************
Una idea de construcción de los P.HALL






SENSORES HALL SENCILLOS Y
FUNCIONALES







http://youtu.be/Xk6j3vI9SbA
FUNCIONALES
Componentes: Un
potenciómetro mecánico de un euro, sensor hall SS495A1, dos imanes de
neodimio, un cable de pines, cinta aislante y pegamento (nural).-
! Como observaréis el objetivo principal es encontrar la separación justa de los imanes con respecto al sensor ! Eso es elemental para que las oscilaciones sean como en la última foto. En forma de "olas" y no "cortes de sierra".-
! Como observaréis el objetivo principal es encontrar la separación justa de los imanes con respecto al sensor ! Eso es elemental para que las oscilaciones sean como en la última foto. En forma de "olas" y no "cortes de sierra".-


Distancia idónea encontrada. He tenido
que superponer y pegar unos trocitos de plástico para que los imanes se
acercaran algo mas al sensor. Si no los bordes de sierra al girar "la
patilla del potenciómetro" serían abismales.... no habría sensibilidad.-



Como
veís no hay "cortes de sierra" durante las subidas y bajadas cuando giramos el potenciometro HALL como pasa a veces
con los poteciómetros mecánicos (sobre todo los que ya tienen bastante uso). En la foto lo estabilizo al 50% por ejemplo y no se mueve. Significa que es muy estable. Y no devemos olvidar que
estamos usando un HALL muy rudimentario.-

VIDEO DEL COMPORTAMIENTO DE UNOS POTENCIOMETROS HALL FRABRICADOS POR EL COMPAÑERO "PETAR2" DEL FORO CON EL FIRM "PRILAD". COMO VEREIS TIENEN UNA SENSIBILIDAD MUY BUENA
http://youtu.be/Xk6j3vI9SbA

Como no podemos usar los famosos "Actuadores 5CN" neumáticos ya que son muy caros y necesitan de "circuitos más complejos y caros" nos centraremos en motores de corriente continua (DC) a 12V que sean fuertes y con capacidad de ser manipulados de forma sencilla.
Los motores (dos) que usaremos serán los que se suelen instalar en los limpiaparabrisas de los vehículos, a poder ser que sean de furgoneta que suelen ser construcción más robusta en sus engranajes y nos durarán más tiempo. Los podréis conseguir facilmente en cualquier desguace muy baratos ya que apenas se suelen romper al ser fabricados con una construcción bastante robusta y duradera.

Como veis el motor consta de un eje que es donde originariamente enlaza con uno de los limpiaparabrisas. Pues bien ese eje lo usaremos para que con su giro trasmita el movimiento a las bielas y estas a su vez a las barras de fuerza.
Estos motores tienen dos inconvenientes que tenemos que solucionar para que puedan ser usados en nuestro sistema.
En primer lugar debemos "aislarlos de masa". Esto a groso modo es que en una parte del circuito interno del motor "toca" en el chasis del propio motor. Eso es normal que sea así de fabrica. Pero para el uso que le vamos a dar estropearía nuestra placa "SparkFun - Monster Moto Shield" (o similares) originando pequeños cortocircuitos que finalmente terminarían por subir en esceso su temperatura interna hasta quemarla en cuestión de segundos.
En segundo lugar una "vez aislado el circuito y por lo tanto ninguna de sus partes toque el chasis" deberemos soldar un cable a cada una de las escobillas para que ese cable salga al exterior.
En primer lugar debemos "aislarlos de masa". Esto a groso modo es que en una parte del circuito interno del motor "toca" en el chasis del propio motor. Eso es normal que sea así de fabrica. Pero para el uso que le vamos a dar estropearía nuestra placa "SparkFun - Monster Moto Shield" (o similares) originando pequeños cortocircuitos que finalmente terminarían por subir en esceso su temperatura interna hasta quemarla en cuestión de segundos.
En segundo lugar una "vez aislado el circuito y por lo tanto ninguna de sus partes toque el chasis" deberemos soldar un cable a cada una de las escobillas para que ese cable salga al exterior.
Para la primera tarea es muy recomendable usar un "multímetro" (15€) el cual nos indicará si hemos aislado correctamente las escobillas del chasis (aislar masa).

Veamos en detalle que debemos hacer:
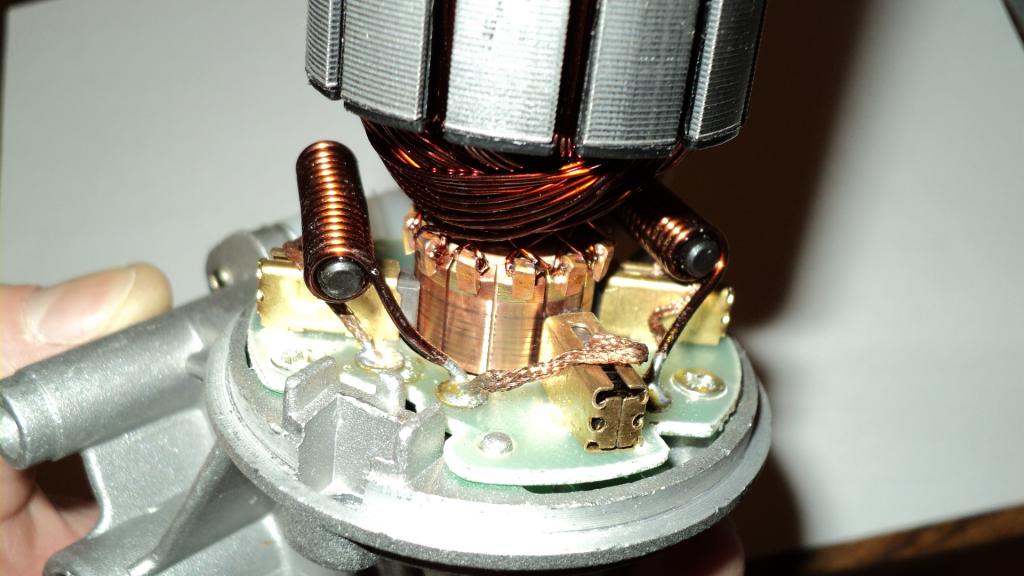
Debemos retirar la "caperuza" negra que estará unida mediante unos tornillos. Una vez retirada nos encontraremos con lo siguiente:


Aquí podemos observar las escobillas. En este motor en concreto nos encontramos con "tres escobillas". ¿ como que tres escobillas ? una escobilla es positivo y la otra negativo!! Si, así es pero es que estos motores están preparados para una velocidad rápida (cuando llueve mucho) o una velocidad corta (cuando llueve poco) por eso en este caso cortaríamos las tres escobillas y las empalmaríamos (provisionalmente empalme con cinta aislate. Luego cuando localicemos la combinación "rápida" es mejor soldar ya que cuando esta el simulador en funcionamiento los motores por dentro se calientan bastante y si esta empalmado con "cinta aislante" pueden despegarse la unión).

ZONA DE CORTE Y EMPALME DEL CABLE
¿Como que una velocidad rápida y otra lenta? Si, en este caso de tres escobillas (A-B-C), nos podemos encontrar con la posibilidad de que A+B (lenta) y A+C (rápida) . Eso lo sabremos cuando con una fuente de alimentacion unamos un cable al positivo (A) y otro al negativo (B) veremos que gira con una cierta velocidad. Y cuando pongamos en el positivo de nuevo (A) y en el negativo (C) sentiremos que girará a mas velocidad. Esas serán las escobillas buenas para utilizar. Las que mas potencia tienen.
De todas formas muchos motores solo tienen dos escobillas (positivo y negativo), cortamos empalmamos y listo.
Nota: estos motores tienen sus conexiones exteriores y cableado propio. No los usaremos. Es mejor sacar los cables directamente de las escobillas.
AISLAR DE MASA DEL CIRCUITO
Como hemos dicho anteriormente el circuito que esta "justo debajo de las escobillas" casi seguro que esta en alguno de sus puntos tocando el chasis del motor. De todas formas para eso tenemos nuestro "multímetro" antes de desarmarlo todo. Una vez esto posicionamos el multímetro en la función especial de comprobar si existe cortocircuito.
Veamos un vídeo; la parte interesante es en el instante 05:50
Cojemos unas de las dos puntas del multímetro (roja o negra) y hacemos
que toque una de ellas una escobilla y la otra punta del multímetro que
toque varias zonas del chasis para asegurarnos. Si escuchamos un sonido es que efectivamente una parte del circuito toca con el chasis y a su vez lo trasmite a la escobilla. Verificar lo mismo en las dos o tres escobillas por curiosidad pero da igual, con que nos de "cortocircuito/masa" en una de ellas tenemos que desarmarlo todo por completo y ver por donde "toca" el circuito al chasis.
En este ejemplo veremos como otro motor de tres escobillas es desarmado totalmente y el usuario verifica que parte estaba "tocando" con el chasis. El ya ha verificado cual es la "velocidad rápida" y procede a localizar por donde "toca el circuito con el chasis".-
Veámos:

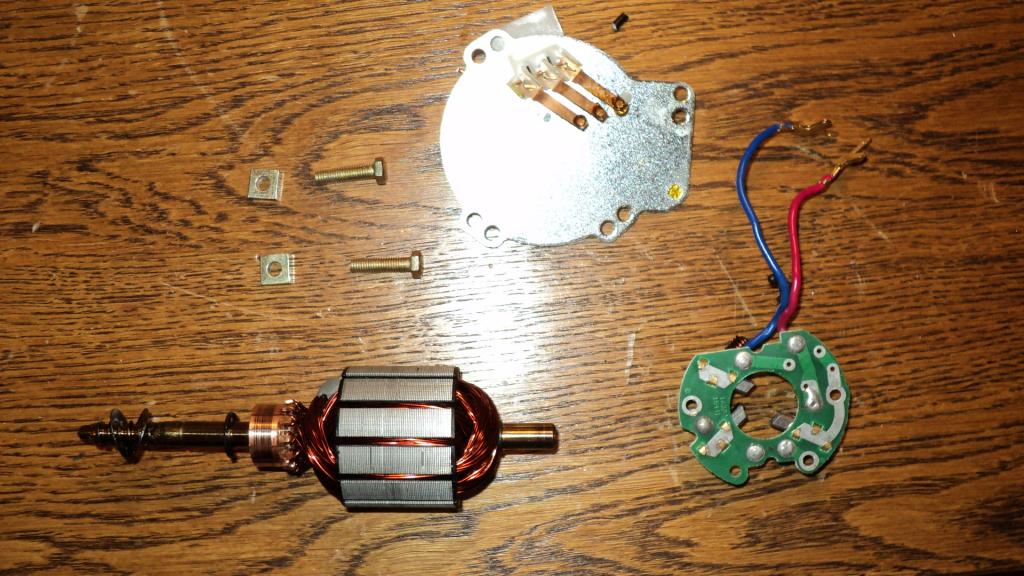
Nota: Una vez desarmado el motor este usuario se da cuenta de que el circuito (parte verde) en la zona derecha "toca con el chasis y procede a aislarlo". Vale cinta adesiva de calidad no de los chinos.
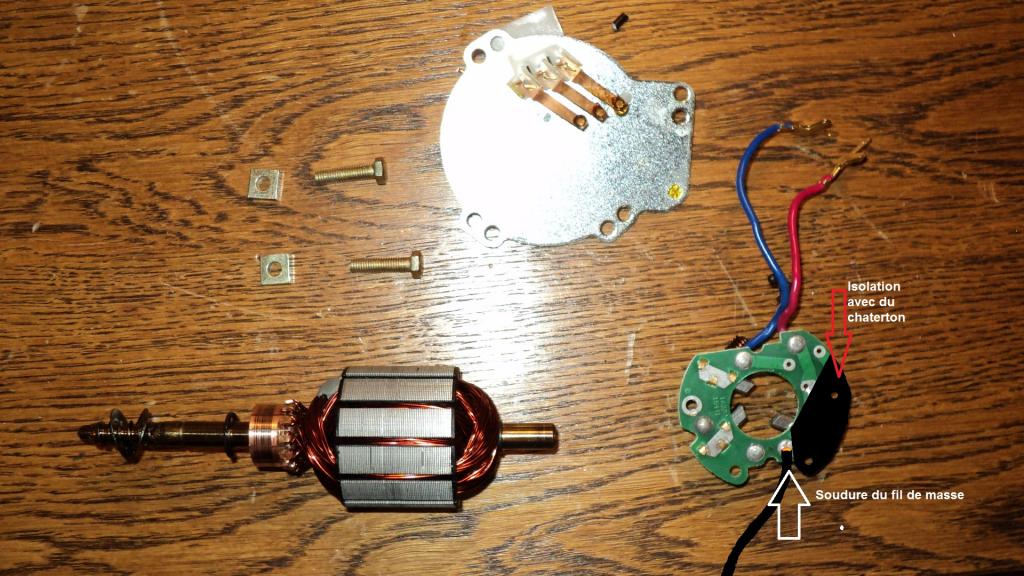
Nota: Vemos como ha aislado la zona por donde toca al chasis y descarta el cable azul. Ya que opta por usar un cable negro ( el cual une a una escobilla ) y el cable rojo a la otra escobilla. Ambas escobillas dan como resultado "velocidad rápida" la cual da mucha mayor vida al simulador.

Motor ya aislado y con su velocidad rápida localizada

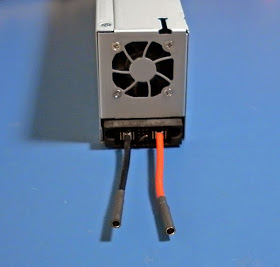
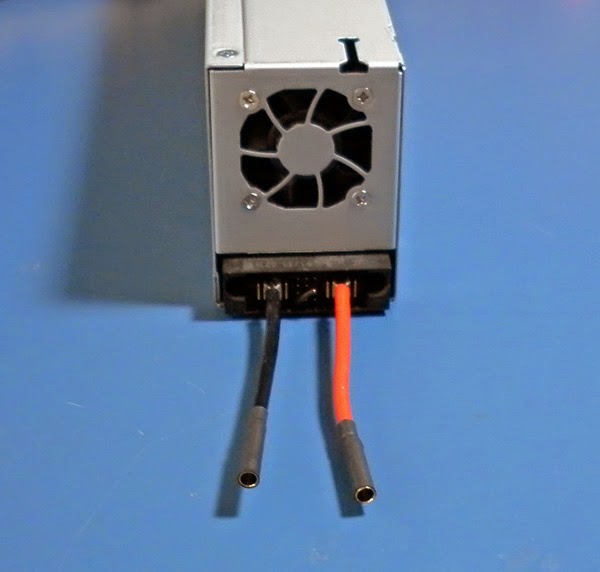
SWF VALEO NIDEC ITT 404.458 gear motor 24V DC
Existe la posibilidad de conseguir este modelo de motor al cual no hay que hacerle absolutamente nada. No hará falta "abrirlo" para aislarlo de masa ( ya está aislado). Como se suele decir... enchufar y listo. Por contra es algo más caro que uno del desguace.-
ESQUEMA SENCILLO DE CONFIGURACION

Como podemos apreciar "polo positivo y polo negativo". Así desarrollan su velocidad máxima. La conexión "en cruz amarilla" indica que esa conexión no se usa. Los motores llevan unos sensores hall pero no se pueden usar para construir un potenciómentro "hall" ( sin rozamiento, basados en imanes ).
ESTRUCTURA Y PRIMEROS PASOS
Como dije al principio del post vamos a elegir el diseño mas sencillo y asequible posible para que en "conjunto" el simulador esté al alcance de todo el mundo. Utilizaremos madera de DM que se puede encontrar en cualquier sitio.
Vamos con las dimensiones de las piezas a recortar de madera:

Dos escuadras grandes para sujetar los motores a ellas y a su vez a la estructura y otras dos de menor tamaño para el respaldo. (4 en total).-


Escuadras para sujetar los motores y los tableros si la estructura es de madera (3,45€)
Necesitaremos cuatro rotulas (de tamaño ajustado al tornillo)

4 Rótulas con rodamientos para poner en los extremos de la vara roscada, 12mm (8,87€ ):
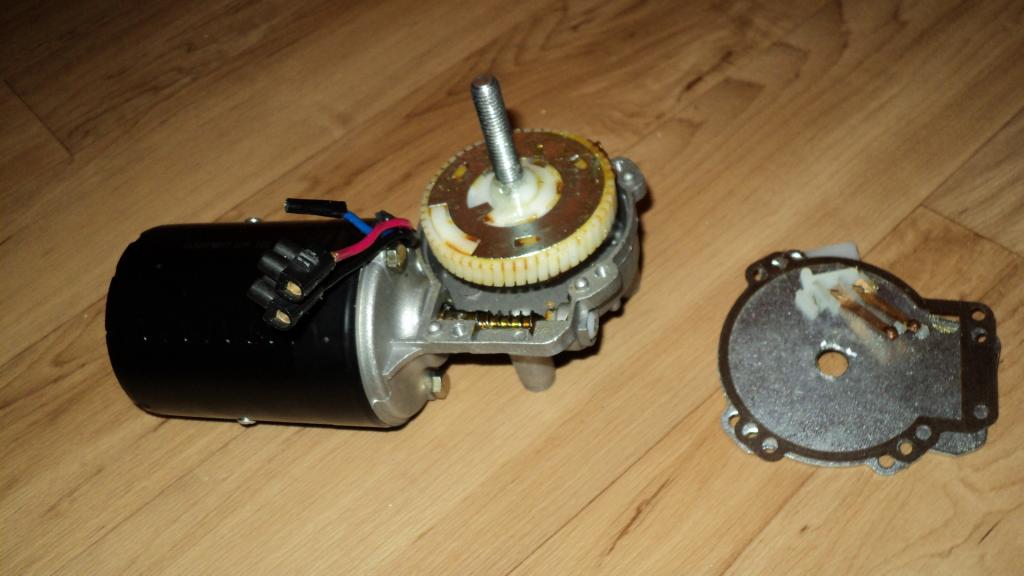
Dos barras largas con rosca (para poder enroscar las rotulas)
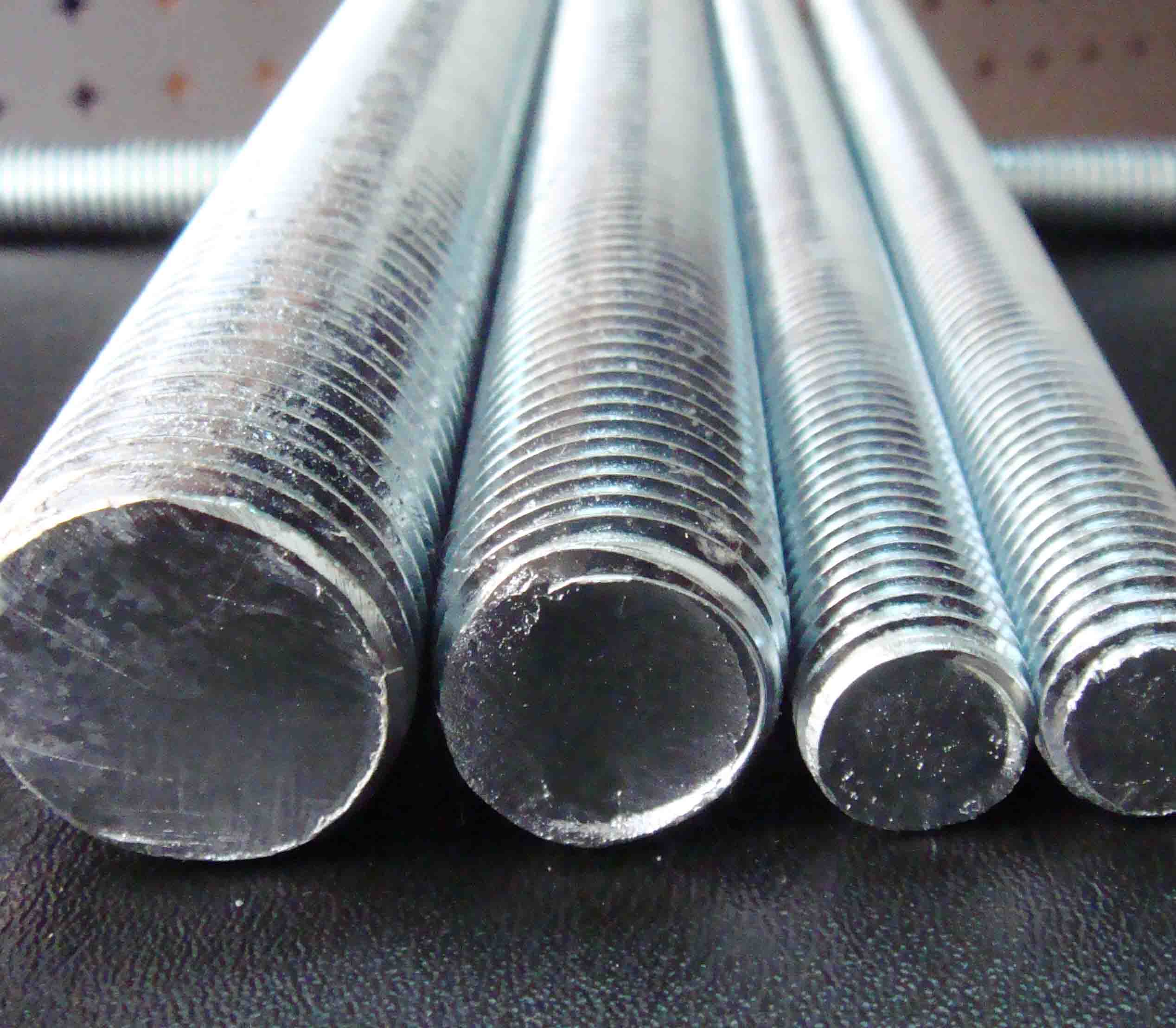
TORNILLOS, TUERCAS, PROLONGADOR Y ARANDELAS
Este modelo en concreto de tornillos hexagonales (modelo M8X40) suelen coincidir con el tamaño exacto de la rosca de los ejes de dichos motores, no obstante, utilizar un calibre y medir vuestros ejes y seguidamente localizar los de vuestra medida. En los "chinos" suelen tener. Todo esto nos servirá para enlazar "con la rosca del eje del motor" y empezar a construir las "manivelas" para dar movimiento.

"Esquema al detalle de lo que queremos conseguir"


Otros métodos para instalar los potenciómetros



SWF VALEO NIDEC ITT
Método usando los motores "VALEO" ya que disponen por el lado contrario al su eje una endidura donde podemos colocar una "barilla metálica" y que esta a su vez con un poco de bricolaje la podamos unir al brazo del potenciometro como vemos en la fotografía siguiente.-
ROTULAS DENTADAS

La construcción del eje central del simulador
Una parte esencial es construir un eje fuerte y fiable pues sera el encargado de soportar todo el peso del simulador más el nuestro.
Tenemos dos métodos que son los mas usados:
1. SILENTBLOCK
2. EJE CARDÁN
MODELOS DE SILENBLOCK

Una de las maneras más sencillas sería usando un "Silenblock + muelle"
Este metodo nos permitira que el "cockpit" oscile sin problemas en todas las direcciones


SILENTBLOCK SENCILLO



EJE CARDÁN

Si tenemos la opción de usar "metal" y poder soldar un buen método es usar un par de planchas y una cardán de transmisión del desguace.-.


Otro ejemplo de eje central en una estructura metálica usando un eje cardán


Si os dáis cuenta lo que se busca es que no "gire" sobre si mismo y así no desestabilice la parte superior del simulador.
Esta es la idea:

Usando un cardán el problema que el cockpit gire sobre si mismo ( flechas rojas ) está solucionado pero usando "SILENBLOKs" puede ser que algo si que pueda girar. Sobre todo si queremos fabricar un "2dof" con el empuje sobre los hombros.

Si nuestra idea es que el empuje sea desde abajo casi no hará falta usar nada más aún usado un silentblock. Los mismos ejes de los motores al estar tan cerca darán bastante estabilidad.

¿COMO EVITAR EL GIRO AL USAR UN SILENTBLOCK?
Podemos solucionar el problema instalando dos pequeñas barillas que ofrecerán un buen punto de apoyo para evitar ese giro.
EJEMPLO
Con esas barillas resaltadas en color amarillo evitaremos ese giro.-

Otro ejemplo:
En la zona amarilla tenemos instalado un "Silentblock" y a su vez es apoyado por dos pequeñas barillas ( lineas rojas inferiores ) para evitar el giro. En esta perspectiva solo logramos ver una de las dos barillas instaladas.-

TENSORES
Un apoyo extra puede ser la instalación de unos tensores que darán si cabe mas estabilidad.

Nota: Algunas de las imágenes han sido extraidas de los proyectos que tienen en marcha los compañeros JJdelalamo, Petar2 e IGM.-
CABLEADO
MOTORES-POTENCIOMETROS-ARDUINO-MONSTER
Antes de instalar todo directamente en la estructura es preferible poner a punto la parte electrónica para que todo este en armonía. Nos será mucho más fácil si cojemos una "tabla" y empezamos a posicionar todos los elementos. En primer lugar los motores, después unidos a su eje "encaramos" los potenciometros. Solo encarados, no unidos por el momento. Con los potenciómetros controlaremos el sentido de giro en una primera instancia. Después haremos que se estabilicen, es decir, que no solo giren "izquierda -derecha" sin parar sino que podamos "detenerlos completamente pero seguirán conectados a 12v esperando los datos de la Arduino. Datos (telemetría que proporciona el X-sim / videojuego).-

Ejemplo: En este ejemplo vemos como con dos tubos de plástico trasparente (afianzado con unas pinzas de tender) ha encarado los potenciometros con el eje de los motores.
¿ Como haremos para que los motores no giren libremente ?
*Usaremos los potenciómetros.
¿ Porque tenemos que encarar así los potenciometros ?
*Como hemos dicho vamos a usar los potenciómetros para controlar el sentido de giro de los motores. Como vemos en la foto el potenciómetro tiene que tener contacto con el eje para saber que esta haciendo el motor (si esta parado o si gira en que dirección). Es muy útil encararlos así porque en una primera instancia no sabremos donde tenemos que conectar el positivo o el negativo en el potenciómetro. En A o C conectamos positivo o negativo ( la primera vez " a voleo") y en B el cable de "datos". Si coincide positivo y negativo (A-C) con la polaridad del motor este no producirá movimiento! Estará neutralizado y solo se moverá si lo "manda la arduino". Si por el contrario el motor aún estando "encarado" con el potenciómetro gira a su antojo debemos desconectar todo el sistema de la "luz" y cambiar en ese potenciometro la posición de positivo y negativo. Osea que si en A teníamos puesto negativo y en C positivo pasaremos a poner en A positivo y en C negativo. Así cuando volvamos a poner en marcha el sistema el motor estará "neutralizado" y a la espera de órdenes.
Nos damos cuenta que si no tenemos "encarados" los potenciómetros con algún sistema similar al de la fotografia, si no acertamos con la polaridad del motor/potenciómetro a la primera entonces el motor podrá girar sin control y destrozar el potenciómetro muy facilmente, pues no le supondrá a motor ningún impedimento romperlo. Usando el método de la fotografía si no acertamos sencillamente el eje girará libremente resbalando por el interior del tubo de plástico.-
Recordemos como son las conexiones de un potenciómetro:
Esquema usando una protoboard para que veáis a donde van a parar todas las conexiones. Luego ya vais conexionando directamente donde corresponda. Parece a primera vista "lioso" pero es sencillo una vez nos pongamos a ello.
Placa Arduino ------------------- Motomonster
Motor 1
Pin 8 ------------------ D7 Dir1
Pin 12 -----------------D8 Dri2
Pin 9 -------------------D5 Pwm
Motor 2
Pin 11---------------- D4 Dir1
Pin 13-----------------D9 Dir2
Pin 10-----------------D6 Pwm
Con más detalle y demás conexiones

Conexiones con los Puentes-H IBT-2 es el siguiente:

Placa Arduino ---------------------------------- IBT-2
Motor 1
PIN 13 .................. PIN 1
PIN 11 .................. PIN 2
PIN 10.................. ("PINS 3 y 4") R_EN y L_EN (misma operación, dividir cable y unir)
Motor 2
PIN 12..................PIN 1
PIN 8 ...................PIN 2
PIN 9 ..................... ("PINS 3 y 4") R_EN y L_EN ( Osea, ese pin 9 debe "dividirse" para que enganche a los dos pines de la IBT2 para entendernos.
PINES 7 y 8 de cada IBT-2 son para el positivo y negativo proveniente de una FUENTE de 5V
No olvidéis que los pines centrales de los potenciómetros (cable señal) deberan ir conectados a las entradas A0 y A1 de la Arduino Uno como pasaba con la MONSTER en el esquema anterior.
* Esa fuente de 5 voltios se puede extraer del arduino aunque es recomendable si es posbile que sea una fuente independiente de calidad si no crearán problemas (ruidos/vibraciones en los motores) con los potenciómetros. Ante la duda .... usar la alimentación de la Arduino Uno.-
NOTA: Pines R_is / L_is (5 y 6) del IBT-2 no se usan.-
VÍDEO
Objetivo: "poder controlar el movimiento de los motores"

!! Ahora ha llegado el momento de entrar de lleno en el software que necesitaremos para darle vida al simulador !!
FIRMWARE/CÓDIGO "PRILAD"
Más adelante veremos que aparte del firm/codigo "Prilad" hay otro llamado "Sirnoname" Versiones. 2013 y 2014 que tienen algo más de sensibilidad pero los métodos para introducirle a la Arduino Uno dicho firmware es diferente al de PRILAD. Ambos firms. dan buenos resultados.-
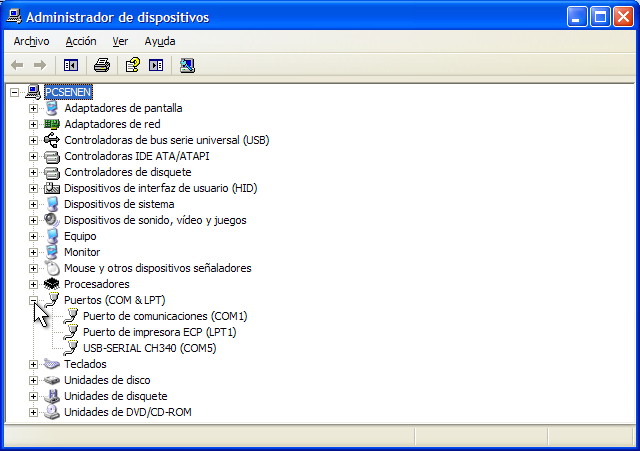
Debemos conectar el arduino al PC por su puerto USB. Una vez conectado nos cercioramos en que número de "COM" esta identificado. Nos saldrá en windows una ventana idéntica a esta donde seleccionaremos el firmware ( contenido en la descarga)
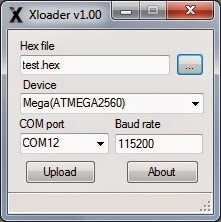 En HEX FILE = 57600.HEX , en DEVICE = Arduino UNO, en COM PORT (según detecte vuestro Windows al Arduino) y en BAUD RATE lo dejamos estar (115200). Finalmente pulsamos UPLOAD.-
En HEX FILE = 57600.HEX , en DEVICE = Arduino UNO, en COM PORT (según detecte vuestro Windows al Arduino) y en BAUD RATE lo dejamos estar (115200). Finalmente pulsamos UPLOAD.-Una vez grabado el firmware "PRILAD" en arduino vamos a " administrador de dispositivos" y en "Puertos o procesadores" seleccionamos nuestro Arduino y en propiedades cambiamos los 9600 por defecto a 57600 baudios y aceptamos.-
Si tenéis problemas a la hora de "cargar" el Firm/código PRILAD con el XLOADER 1.1 podéis usar el siguiente programa.
"CodeBlocks-Arduino"
ARDUINO BUILDER
Una breve guía del los principales parámetros del programa
DESCARGA DEL XSIM CONTROLLER 2.2
Este programa tiene como objetivo no solo que los motores estén neutralizados sino que podamos controlar su giro. Los parámetros que tenemos que poner al programa son casi "standard" pero a veces hay que retocarlos levemente para que vaya el sistema más fino. Es decir, que las "bielas" suban y bajen escalonadamente y no abruptamente o a tirones.
Nota: No hay que obsesionarse mucho con este programa. Lo importante es prepararse bien todos los componentes en una tabla como he puesto en la foto de más arriba. Nada más activar la casilla para recibir datos veremos como los potenciómetros nos dan información en su barra de "%". Hay que ponerlos al 50% rotándolos manualmente. Los motores tambien se moveran pero el objetivo es poner los potenciometros al 50€ y que las bielas queden en un angulo que nos guste ( las bielas quedarán al final en la misma inclinación). Por lo tento es sobre todo una "configuración" manual mas que de sofware. Cuando veamos que vamos avanzando en el control de los motores y ya más o menos los tengamos configurados no olvidéis darle al botón "SAVE SETTING TO EEPROM" para que se queden guardados esos parámetros en el arduino.-

Mirar:

En este video aunque este usuario esta usando otro tipos de circuitos electrónicos el objetivo y el funcionamiento es el mismo. Ajustar los motores (determinar su recorrido) y que los potenciómetros controlen el movimiento. Como vimos anteriormente primero los "encaramos" y después ya todo configurado los ponemos con algo fijo. Así si fallamos no los romperemos. Más adelante, cuando vayamos a poner todo ya en la estructura (simulador) veremos sistemas de poner fijos los potenciómetros (desde poner pegamento hasta otras más ingeniosas). Lo importante es que estén bien fijos al eje. Es primordial.-
En este video vemos como con las palancas mueve los motores. También
vemos como ha fijado los potenciómetros al eje. Esa es la ida. Poco a
poco jugando con los parámetros va ajustando los motores. Quitándoles
vibraciones y que respondan rápidos y a la vez suaves, sin ruidos o
saltos.-
Aquí en este video del compañero (jjdelalamo) podemos observar como va "jugando" con las barras del programa para mover a voluntad los motores. Como dije anteriormente estos movimientos se pueden dejar en automatico para revisr con mas profundidad si existe algun fallo a la larga en la sensibilidad y ajuste de los potenciómetros.-
Una vez configurados los motores cerramos la aplicación y deberemos registrarnos en esta WEB donde en la sección "descargas" conseguiremos esta aplicación cuya función es la siguiente: extraer la telemetría del videojuego pasarla a la controladora "arduino" y esta a su vez a la placa "monster" que dará movimiento controlado a los motores eléctricos.-
- X-Sim Software Installer Version 3.0.2.9
- WEBSITE: http://www.x-sim.de/forum//dm_eds/showcat.php?id=2
El programa una vez instalado se compone de dos partes:
- X-Sim Extractor: se encarga de iniciar "el juego" y de extraer su telemetría.
- X-Sim Converter: su función es pasar esa telemetría a la controladora arduino.

Configuración del X-Sim Extractor:

Configuración del X-Sim Converter:

Perfil descarga


Una vez todo configurado al pulsar Start ya estará mandando toda la información a la controladora "Arduino" y esta a su vez a la placa "Monster" dando como resultado movimiento en el simulador.-
Video ejemplo usado el programa X-sim ya totalmente configurado y listo para instalar todo el sistema a la estructura del simulador.
Esta persona utiliza otros "circuitos" pero en definitiva es lo mismo. Controladora, una "monster" para entendernos y dos potenciómetros. En este caso los potenciómetros los ha instalado por la parte de atrás del motor. Eso ya depende del modelo que compremos de motores. Algunos permiten tambien por la parte trasera. Es como si el eje diera "la cara" por las dos partes del motor. Al final es lo mismo.
Una vez todo listo instalamos los motores en la estructura con sus potenciometros bien instalados y unidos al eje usando el método que mas o guste o sea mas ingenioso. Una vez hecho esto la tabla o la caja con todos los circuitos la instalaremos debajo del asiento y conectaremos todos los cables. Unimos las barras metálicas que salen del respaldo a la zona de unión de las bielas. Y practica mente ahora lo que toca es a través de sofware X-SIM adaptar el movimiento del "sillón" a nuestro gusto ( que sea más brusco o más suave ).-
Os pongo unas fotos rápidas aun sin terminar este simulador "LOW COST". Como podéis apreciar tengo aún los circuitos en la tabla de madera y con cinta aislante pero así es mas o menos como quedaría el tema. Luego ya cada uno le da su toque personal. Pero el objetivo es ese. LOW COST y que funcione perfectamente.
Así conforme está ya es funcional y va perfecto con el DK2 y el LFS . Ahora toca poner los circuitos en una caja metálica bien ventilada y todo ordenado.






FIRMWARE SIRNONAME (2013)
Bien, en este apartado aprenderemos a usar un nuevo "código/firmware" que introduciremos a la Arduino UNO para controlar los Puentes H y estos a su vez los motores. Cabe destacar que su función será la misma que el firmware usado anteriormente denominado "PRILAD". Su particularidad radica en que es más fino a la hora de controlar el ángulo de giro de los motores, es decir, menos brusco.
De todas formas usando "PRILAD" se puede quedar el sistema también muy fino. También indicaré las "conexiones" que necesitaremos para usarlo con dos Puentes H IBT-2. Existen pequeños cambios con respecto a "PRILAD". También veremos las conexiones para usar una MONSTER.-
Un detalle que quiero dejar claro es que para configurar el "Firm. SIRNONAME" no necesitaremos las herramientas "XSIM CONTROLLER 2.2" ni el programa para introducir el Firm/código "XLOADER" que sin embargo si son necesarios como vimos anteriormente para introducir el Firm. PRILAD a la Arduino Uno.-
Ahora con el Firm. SIRNONAME toda la tarea de configuración se realizará desde el propio programa X-SIM que descargamos de su website.-
El firmware Sirnoname divide la rotación de los motores ( los 360ª posibles) en una resolución 1024 puntos frente a los 255 del de prilad ( ángulos de giro del motor ). Por lo tanto la sensibilidad será mayor.

Destacar al creador con nick "SIRNONAME" al cual podemos encontrar en el foro X-sim.de
Primero descargaremos el firmware Sirnoname (2013)
El paquete consta de dos archivos: ArduinoXPID.dll y XPID.
ArduinoXPID.dll deberemos copiarlo en la carpeta de XSIM en Windows
(RUTA: X-Sim /Interfaceplugins/ aqui dentro)
XPID este es el código/firmware.
¿ Como introducir el Firm/codigo a la Arduino Uno ?
Primeramente abrimos el Software oficial de Arduino y localizamos el archivo "XPID"

Una vez elegido el archivo "XPID" nos a parecerá esta ventana. Para terminar el proceso de introducir a la Arduino Uno el firm/código "Sirnoname" le pulsaremos el botón "CARGAR" que viene indicando con una flecha.-

NOTA: El puerto de la Arduino en "Administrador de dispositivos" de WINDOWS debe estar configurado a 115200.-

Una vez instalado el código Sirnoname en la Arduino Uno procederemos a cablear el sistema
ARDUINO----------------------------IBT-2
Motor 1
Pin 2-------------------------------------- Pin 1
Pin 3-------------------------------------- Pin 2
Pin 10-------------------------------- Pin 3 y 4
Pin A0------------------------------- patilla central del potenciómetro
Motor 2
Pin 4------------------------------------ Pin 1
Pin 5------------------------------------ Pin 2
Pin 9-------------------------------- pin 3 y 4
Pin A1-------------------------------- patilla central del potenciómetro
Nota
Como veís tanto el pin 10 como el pin 9 de la Ardunio como pasaba con "PRILAD" se multiplica 2x ya que la IBT-2 necesita esa señal en dos cables. Tampoco olvidad que tanto la IBT-2 como los potenciómetros deben de ser alimentados a 5v.-

El conexionado con este firmware y la MONSTER es el siguiente:
ARDUINO----------------------------MONSTER
PIN 3 ..................D8 Dir2
PIN 10.................D5 Pwm
Pin A0------------------------------- patilla central del potenciómetro
PIN 5..................D9 Dir2
PIN 9..................D6 Pwm
Pin A1------------------------------- patilla central del potenciómetro
NOTA: No olvideis alimentar a la MONSTER con su positivo y negativo a 5v. Y también a los potenciómetros con el mismo voltaje.
Cabe destacar que es muy importante que esos 5v sean de "calidad" si no tendremos "ruidos" en los motores. Es decir, si la fuente de alimentacion no da un voltaje limpio a 5v tendremos problemas. Por lo tanto si no estamos seguros mejor alimentar a la MONSTER y a los Potenciometros con los 5v de la arduino.-
Yo tuve problemas de "ruidos" en los motores... no daba con el problema hasta que se me ocurrió que el voltaje de los 5v del sistema los proporcionara la arduino Uno. Y se acabaron los ruidos. Además las variaciones de los potenciómetros eran mas finas. Yo creo que el problema fué que mi fuente oscilaba "sutilmente" esos 5v y claro... estos componentes tan sensibles "casi de juguete" lo notan mucho.
Ahora iremos al software X-SIM
Como indicó en su dia el compañero DUALIN realizaremos los siguientes pasos:
1. Abrimos X-Sim.
2. Borramos lo que tengamos en USO ( osea, toda la configuración usada en "PRILAD"). Lo dejamos todo "bien limpio". Sino creará conflicto con el nuevo sistema de comunicación XPID.-

3. Bien, ahora vamos a la ventana de
Interface settings, allí desmarcamos todos los interfaces excepto el
Xpid.
TEST ONE INTERFACE OUTPUT PIN
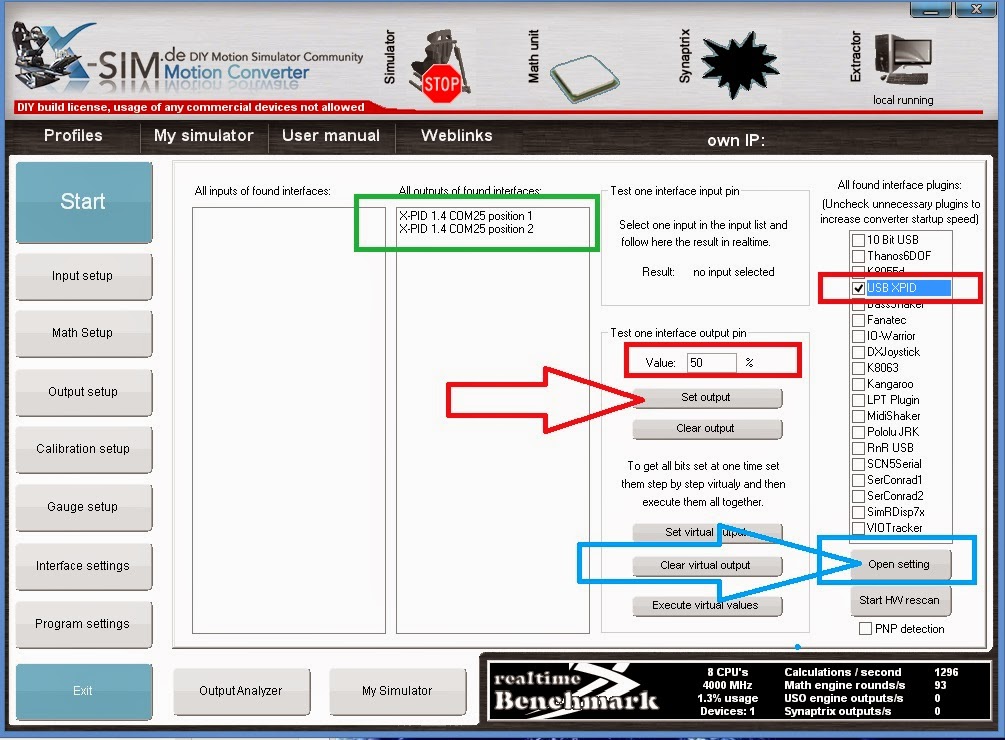 En este apartado podemos realizar un pequeño TEST para verificar como se comportan el movimiento de las "bielas" de nuestro simulador bajo el sistema "SIRNONAME".
En este apartado podemos realizar un pequeño TEST para verificar como se comportan el movimiento de las "bielas" de nuestro simulador bajo el sistema "SIRNONAME".Normalmente dejamos la biela "a mano" con una inclinación deseada para cuando inicia el simulador y seguidamente encaramos el potenciómetro al eje del motor al "50%" aproximadamente de su recorrido para que tenga margen tanto para subir como para bajar la biela al poner en funcionamiento el sistema.
Bien, pues una vez hecho eso en este apartado "VALUE" podemos hacer que se desplace la biela del motor elegido del 0% al 100%. Aunque creo que lo mejor es no forzar los extremos y oscilar entre 10% y 90%.-
Es posible que cuando añadamos esos valores y el motor se mueva por ejemplo al 60% efectivamente obedezca y se mueva al 60% pero oigamos un pequeño ruido interno del motor cuando paré. Eso a priori es normal. La sensibilidad del potenciómetro estaría entre 59/61% y por lo tanto esta rectificando continuamente su posición. Igual si marcamos 61% no haga ningún ruido.
Lo importante es que al 50% no haga ruido ya que desde ese valor como te indicaré más adelante afinaremos los potenciómetros para que no hagan ruidos los motores, "si es que los hace", porque puede ser que con la configuración por defecto del "perfil" y potenciómetros vaya todo como la seda. En definitiva el objetivo perseguido es que se queden los motores "neutros" y a la espera de órdenes.-

En esta foto observamos como aproximadamente coinciden ambos valores. Se puede corregir girando un poco el potenciometro un 10% con el sistema apagado manteniendo la biela sin moverse.
Nota: Antes de hacer ese "TEST" es conveniente como veréis en la siguiente foto delimitar el máximo y el mínimo "recorrido" del potenciómetro/biela que controlará cada motor.
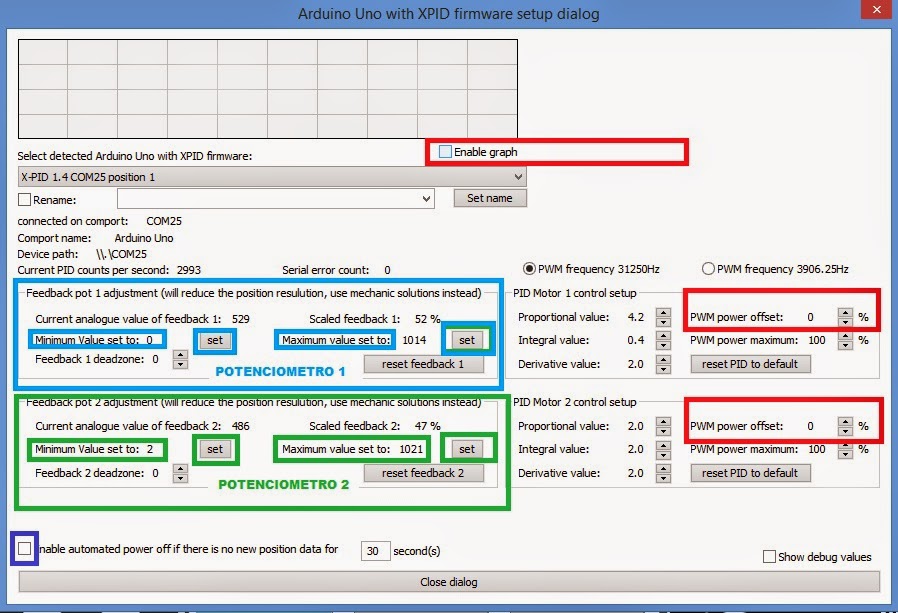
4. Como anteriormente hemos visto antes de realizar el "TEST" entramos en el Xpid y allí tenemos que configurar los
máximos y mínimos de cada motor. Bajamos las bielas hasta abajo y le
damos a set en el minimo (Minimum value set to:) de cada motor y luego hacemos lo mismo
subiendolas hasta arriba y dándole a set en el valor máximo ( maximum value set to:).
El power offset hay que ponerlo a 0 en ambos motores.
5. En la opción ENABLE GRAPH podremos habilitar el poder observar como oscilan los potenciómetros desde su parte baja (0%) hasta su valor más alto (100%).
Puede
ser que cuando tengamos definidos los motores al 50% y en teoría
debieran de estar "neutros" ( a la espera de instrucciones) , estos sin
embargo "giran libremente" en una dirección.
Para corregir ese problema debemos configurar el parametro FEEDBACK: 1 o 2 DEADZONE .
6. En el apartado PID MOTOR 1/ 2 CONTROL SETUP con esos valores me han funcionado. Pero seguramente alguno de vosotros tenga que variar alguno. Son valores parecidos a los usados en "PRILAD" para dar o quitar sensibilidad a los potenciómetros hacia su giro derecha/izquierda respectivamente.-
VALORES
Proportional, integral y derivate value
A randes rasgos sirven para lo siguiente: Afinar la sensibilidad de los potenciómetros.-
Es decir... al conectar todo el sistema es posible que el motor/es hagan un ruido "interno interno" cuando estan en su posicion de "espera".
Es decir... al conectar todo el sistema es posible que el motor/es hagan un ruido "interno interno" cuando estan en su posicion de "espera".
Eso es porque al motor le está llegando energía (ese ruido)
pero no la suficiente para desplazarse. Eso hay que
eliminarlo/arreglarlo. El sistema "cree" que el potenciómetro se está moviendo e intenta corregir su posición.
La mejor opción es arrancar un juego elegir coche y con el motor arrancado
pero detenido en pista verificar que tanto el motor derecho como izquierdo
no hacen ruido. Y si lo hacen hay que bajar o subir los valores...
normalmente se bajan.-
De todas formas si estan mal afinados estos valores nada más arrancar el XSIM los motores "harán" ruido y en el peor de los casos habrá tando desfase que se moveran para un lado u otro la biela. Pero no es lo normal. Este setup es para un ajuste fino.
Los valores de la zona verde son los
ángulos de giro. Desde 0 a 1023 en teoría. Pero ya depende de cada
potenciómetro. Es necesario calibrarlo. Los dos potenciómetros por
separado

7. Por último debemos sustituir los antiguos AXIS 1 y AXIS 2 por los nuevos "EJES XPID". Sino realizamos este paso aunque el juego emita la telemetría y los valores numéricos de las fuerzas veamos que se "mueven" no llegará la señal correctamente a los EJES/MOTORES.-
"NUEVOS EJES"
(AXIS 1) ---- XPID 1.4 COM* position 1
(AXIS 2) ---- XPID 1.4 COM* position 2
POR LO TANTO REALIZAREMOS LA SIGUIENTE SUSTITUCION DE EJES

Configuración del X-Sim Converter
Perfil descarga (SIRNONAME)
Lo importante como he indicado antes es cambiar/sustituir los axis 1/2 antiguos de tu perfil (Los AXIS 1 y 2) por los nuevos XPID 1.4 COM 1/2
Perfil descarga (SIRNONAME)
Nota: Si ya tienes bien configurado tu PERFIL no hace falta bajarse este. Esta descarga es para los que intentan de primeras el firm. Sirnoname.
Lo importante como he indicado antes es cambiar/sustituir los axis 1/2 antiguos de tu perfil (Los AXIS 1 y 2) por los nuevos XPID 1.4 COM 1/2
**************************************************
UN NUEVO MÉTODO PARA LOS QUE QUIERAN USAR EL FIRM. SIRNONAME Y UNA MONSTER SHIELD
! SIN APENAS CABLEAR !
SIRNONAME (2014)
*******************************************
LAS "3" díferencias básicas con respecto a la versión 2013
 1. La posibilidad de "fusionar-pinchar" ambas placas una encima de otra haciendo coincidir sus pines.
1. La posibilidad de "fusionar-pinchar" ambas placas una encima de otra haciendo coincidir sus pines.
2. Que los pines de señal para los potenciómetros son los pines A4 y Pin A5 y no los "típicos" A0 y A1 que si se utilizan para "PRILAD" y "Sirnoname 2013".-
3. Que los ejes XPID en el "Sirnoname 2013" los reconoce el XSIM como XPID 1.4 COM 1/2 y en la versión 2014 (Fusión) como XPID 2.0 COM 1/2
 Por lo demás... son idénticos en prestaciones.-
Por lo demás... son idénticos en prestaciones.-
El autor Sirnoname creó hace unos meses (2014) una nueva configuración
de su firmware para ser usado simplemente fusionando una ARDUINO UNO y
una MONSTER. Así nos ahorramos en gran medida el cablear y podemos
instalarlo en un sitio más reducido.
Aunque eso es relativo ya que la
"monster" se calienta mucho y necesitará un buen disipador y ventilador.
*******************************************
LAS "3" díferencias básicas con respecto a la versión 2013


Como podéis observar esta MONSTER lleva instalado los pines necesarios para la fusión con la Arduino UNO

El firmware se introduce facilmente usando el programa oficial de Arduino.-

Una vez introducido el código/firm. a la Arduino UNO los pasos a seguir son idénticos a los expuestos anteriormente. Todo se hace en el programa X-SIM.-
¿ DONDE CONECTO EL CABLE SEÑAL DE LOS POTENCIOMETROS CON EL SIRNONAME 2014 ?
Pin A4 - input of feedback positioning from motor A, wire here the feedback pot middle pin
Pin A5 - input of feedback positioning from motor B, wire here the feedback pot middle pin
Other pot pins go to +5V and GND of arduino.
NOTA: Por lo tanto los pines que vamos a usar serán Pin A4 y Pin A5 para la señal de los potenciometros.-

**********************************************************
Fuente oficial SIRNONAME
Fabricación sencilla de un "Panel/display" básico
Damos las gracias a "tronicgr" por mostrarnos el camino
El coste total serán 8 euros y el resultado es bastante bueno. Necesitaremos estos dos componentes.
Realmente lo que haremos será a través de otro arduino (versión nano) conectarle una "placa display" para que nos muestre la marcha actual en carrera, velocidad y RPM en formato escala de colores.
Lo conectaremos en un USB de nuestro ordenador y lo configuraremos con el XSIM.
Hay que tener claro que no tiene nada que ver esta configuración con todo el sistema "2dof" del inicio de la guía. Esto es un "extra" y requiere de otro puerto USB de nuestro PC . Es decir, vamos a introducirle al XSim "otro periférico", así de fácil.


Un Arduino Nano V. 3 (3€)
Estos dos componentes se deben unir como se indica en siguientes fotografias. Con cableado hembra/hembra será sencillo.


DRIVERS NANO V.3 (CHINA)
En el administrador de dispositivos debe aparecer como: USB-SERIAL CH340 (COM*)
Antes de ingresar el codigo al arduino nano es necesario "introducir una nueva libreria de comandos al programa oficial de Arduino", la libreria es:
TM1638/TM1640
DESCARGA versión (v2.1.3)
BITS POR SEGUNDO
115200

Bien, ahora conectamos el arduino nano v.3 con nuestro PC via USB/mini USB y le introducimos con la herramienta oficial de Ardunio el siguiente código/sketch:

TM1638 display Ver.Tanos
Bien, ahora en XSIM debemos configurarlo como un "extra", es decir, otro periférico a parte del ARDUINO UNO R3 que nos maneja los motores del SIMULADOR
Para hacerlo más facil os pongo "un perfil de descarga" para el XSIM incluyendo el control de los motores visto anteriormente en la GUIA y el display TM1638 que nos ocupa. De todas formas os muestro con más detalle los pasos a seguir.-
Códígo datapacket: R~a01~~95~S~a02~G~a03~
CONFIGURACION (RPM/VELOCIDAD)

CONFIGURACION (GEARS/MARCHAS)

Descarga del perfil: ( Control de motores + módulo display TM1638 )
DESCARGAR

Con esta actualización le podremos dar vida a los botones de la parte inferior de la placa display y podremos obtener algunos datos extras que vereis a continuación:


TM1638 display Ver.PSARIAS
> Link de descarga <



•
Widgets digitales para indicador de marcha, RPM, velocidad, tiempo de
vuelta actual, el número de vuelta, Tiempo Delta (Lap Lap Best actual
VS), temperatura del agua (RBR), la distancia restante (RBR).

Actualización del "código/sketch" para el display TM1638
Le damos las gracias al compañero "PSArias" por su trabajo
Botón 1: Muestra la marcha actual y la velocidad con los leds iluminando de izquierda a derecha.
Botón 2: Lo mismo que el 1, pero cambia la forma de iluminación de los leds hacia el centro.
Botón 3: Para setear las RPM máximas. (Con los botones 6 y 7 se disminuye y aumenta la cantidad
respectivamente)
Botón 4: Temperatura de agua y aceite.
Botón 5: Gasolina restante.
Botón 6: Capacidad máxima del tanque de gasolina. (Con los botones 6 y 7 se disminuye y aumenta la cantidad respectivamente)
Botón
7: Cambiar la intensidad de iluminación del display en general. (Con
los botones 6 y 7 se disminuye y aumenta la intensidad respectivamente)
Botón 8: Sale de cualquiera de las opciones anteriores.
PSarias: Como podrán ver, he implementado funciones extra, tales como la muestra
de temperatura, gasolina restante (a medida que queda menos gasolina los
leds se van apagando) y la posibilidad de poder cambiar las RPM a las
que se mostrará el shift light, cambiar la cantidad de gasolina máxima
(para el correcto funcionamiento de la gasolina restante que indican los
leds) y cambiar la intensidad de luminosidad del display en general.
Todas estas funciones se pueden seleccionar pulsando los distintos
botones que trae la TM1638 debajo:

Bien, ahora como hicimos con la primera versión conectamos el arduino nano v.3 con nuestro PC via
USB/mini USB y le introducimos con la herramienta oficial de Ardunio el
siguiente código/sketch:

TM1638 display Ver.PSARIAS
Igual que con la version anterior, para hacerlo más facil os pongo "un perfil de descarga" para el XSIM incluyendo el control de los motores visto anteriormente en la GUIA y el display TM1638 que nos ocupa con la "nueva versión" que habilita la botonera del display.-
Descarga del perfil: ( Control de motores + módulo display TM1638 con la nueva actualización)
Debe de quedar así
(cada uno con sus Núm. de PUERTOS COM detectados)
En mi caso el puerto COM 15 pertenece al Arduino Nano/Display TM1638 y el puerto COM 6 al Arduino UNO (motores).-
COM 15:
DATAPACKET= R~a03~~75~S~a04~G~a05~O~a06~W~a07~F~a08~
33 ms
Velocidad: 115200
COM 6:
DATAPACKET= AB~255~~a01~~a02~
33ms
Velocidad: 57600
MÁS METODOS PARA TENER UN DISPLAY COMPLETO EN CARRERA
Es un método curioso; en esencia es que el programa "X-sim" mande los datos a un movil/tablet android y éste a su vez nos muestre la información en su pantalla.
DashMeterPRO es una aplicación que convierte tu dispositivo Android en un display de carreras totalmente configurable,
incluyendo un sistema de telemetría en directo y visor de datos.
Las últimas 50 vueltas se registran para su posterior revisión!
VIDEO INSTALACIÓN / CONFIGURACIÓN
APLICACIÓN ANDROID OFICIAL
compatible with iRacing™.
compatible with rFactor 2™, rFactor 1™, Game Stock car™ and Arca Sim Racing™.
compatible with RaceRoom Racing Experience™, GTR2™, Race07™, RaceRoom The Game 2™, GTR Evolution™.
compatible with RBR™ and Codemasters™ games.
Hola, soy Dualin, que tan amablemente menciona el autor de esta guía. Efectivamente con esta guía es factible fabricarse un buen 2dof, yo estoy ahora con un 6dof y claro, es más caro y difícil, pero más gratificante, aparte de servir también como simulador de vuelo. A mi no me molesta esta guía, de hecho he ayudado a prepararla. Pero si que es cierto que he construido algún simulador por encargo o he ayudado a construir alguno a cambio de algo de dinero. Una cosa es esta guía básica, con la que a poco que seas un poquito hábil serás capaz de hacerte un simulador muy aparente del estilo al primero que yo hice
ResponderEliminarhttp://youtu.be/HCeaMgG2WH4
Pero si alguien quiere hacerse algo en un escalón superior (un 2dof con mejor electrónica y motores) y configurarlo finamente, o subir aún más escalones e ir a por un 6dof, que le valga para simuladores de conducción y/o aviación, que contacte conmigo y seguro que encontramos un precio que nos convenga a ambos. También si alguien no quiere mancharse las manos yo hago todo el trabajo por el. En mi canal de Youtube podéis ver también algunas primeras pruebas del 6dof, probablemente esta semana suba un video con el terminado. Alguna foto del 6dof
https://imageshack.com/i/exLD45omj
https://imageshack.com/i/idPEuIR1j
https://imageshack.com/i/ex6py1icj
https://imageshack.com/i/ezMWkOjCj
Saludos
Dualin
Este comentario ha sido eliminado por el autor.
Eliminarbuenas, nose como ponerme en contacto contigo, podrias mandarme un e-mail para hablar?
Eliminarun saludo
j.posadas205@gmail.com
hola como estas quisiera ponerme en contacto este es mi correo
Eliminarvdelrosario08@gmail.com
Hola buenas,estoy interesado en fabricar un simulador. Pero si me das un precio que me interese,no me importaría hacerlo contigo.email: ismaelmm.comercio@gmail.com
EliminarBuenas dualin, ¿puedes ponerte en contacto conmigo? ismaelmm.comercio@gmail.com gracias
EliminarBuen trabajo. Estoy deseando ver los videos en funcionamiento junto al DK2. Por cierto, podrias describir la experiencia con el DK2 y el LFS? es que estoy por pillar uno, pero no se si vale realmente la pena.
ResponderEliminarGracias por la info y un saludo.
Pues la experiencia es espectacular. A mi siempre me han gustado mucho los juegos de coches por así decirlo. Actualmente la verdad es que son ya más bien simuladores. Pues tuve la suerte de poder probar cuando me llegó hace unos dias el Oculus Rift Dk2 con mi simulador "2dof" y el live for speed que a día de hoy es el mejor juego (super optimizado diría) para su uso con las Oculus rift DK2. Como te digo en la guía el resultado fue de lo más realista y más aún si cabe cuando eliges un Fórmula Uno ya que la aceleraciones/deceleraciones, cambios de marcha son mucho mayores.
ResponderEliminarEs cierto que el Dk2 aún sigue mareando.Pero mi sorpresa fue que en juegos de "conducción" no marea nada y si juegas en un simulador con movimiento vas aún más cómodo. La verdad es que es una suerte para los que nos gusta la simulación que pase esto tan curioso.
Sin embargo a la gente que disfruta más con los juegos en primera persona, tiros, bombas, movimientos de cámara bruscos, todo a la carrera... ahí lamentablemente alcanzas unas cotas bastante altas de mareos, todo sea dicho. En cierta manerá tiene sentido que sea así. Tus ojos perciben un movimiento que no se corresponde con lo que tu sentido del equilibrio, músculos, huesos le "da a entender a tu cerebro" y eso visto lo visto crea un "choque de informacion contradictoria". Es verdad que unos los aguantan mejor que otros... pero el mareo tarde o temprano... te llega.
Por lo tanto basandome en mi experiencia creo que el "2dof" al dar movimiento sin apenas lag engaña mejor al cerebro dando como resultado una experiencia sin mareos. te pondría como ejemplo a mi novia que literealmente "odiaba" el dk1 cuando se lo ponía con el LFS y más aun con juegos en 1º persona ( los mareos eran de campeonato). Ahora con el DK2 con su posicionamiento absoluto y su baja persistencia unido con el "2dof"estuvo 20 min dándole al juego sin ninguna molestia. Fue algo curioso.
Un saludo.-
kaelh una pregunta que perfil has usado para xsim en este tuto, osea basado en el de quien, el de matracing? O sirnoname? Saludos
ResponderEliminarDe nadie en concreto... es personalizado mio para su uso en el Firm. de Prilad. Aunque al final cada uno lo tiene que ir adaptando un poco a su "2dof".
EliminarSi uno quiere los movimientos (fuerzas) mas suaves o mas agresivas deberá cambiar los valores al alza o a la baja.
Gracias KAELH
ResponderEliminarMuy buena información, voy a probar tu perfil
Me alegra que te sea de ayuda la guía!
EliminarSi, prueba ese perfil genérico. Funciona muy bien aunque luego tendras que retocarlo un poco acorde a las características de tu "2dof". Según la polaridad de tus motores/potenciómetros tengas que invertir alguna "fuerza" del x-sim software.
Hola que diferencia hay entre x-sim, y simtools? los ha probado, he escuchado que es muchisimo mas facil de configurar.
ResponderEliminarHola!
EliminarSi, comentan que es más sencillo de configurar en algunas cosas. Yo personalmente me centré en este software.
Tendremos que echarle un ojo mas adelante al Simtools.
De todas formas una vez familiarizado con el X-sim no es tan complicado.
Saludos
muchas gracias por esta guia,gran trabajo...
ResponderEliminarGracias y bienvenido! Espero que te sea útil.
EliminarTengo muy buenos colaboradores que me ayudan para completar cada vez mas la guía.
Pasate por los foros si tienes algún problema. Encontrarás buena gente que te ayudará.
Saludos!
Hola KAELH necesitó tu ayuda, ya tengo los componentes para armar el display pero el problema es que el pc no me reconoce el nano v3 instale los drivers que dejaste en la guía pero no lo he podido conseguir. Ya cambie cable USB y puerto USB en el pc, lo conecto y no pasa nada no lo reconoce ni nada. Necesito ayuda por favor. Muchas gracias
ResponderEliminarHola!
ResponderEliminarPuedes probar lo siguiente:
Ve hacia el administrador de dispositivos de windows. Una vez alli conecta la NANO ARDUINO, te debe de aparecer enseguida un icono, quizá te salga como "desconocido" o por defecto el propio windows le halla otorgado un driver que considerase más oportuno. Al nano chino se le debe instalar el driver que pongo en "descargas" para que funcione bien. Métele de forma "manual" el driver al NANO. En dispositivos cuando lo enchufes y salga como detectado le pinchas encima y le instalas "manualmente" el driver. Debe ser detectado como USB-SERIAL CH340.-
Inténtalo.-
Muy bien explicado, da ganas de montarse uno menos mal que no tengo espacio sino ya estaba pidiendo piezas, solo te reprocho que me has metido el gusanillo, ya que no dejo de darle vueltas al tema, en fin saludos desde Vigo y gracias por poner tus conocimientos al alcance de todos, te felicito kaelh.
ResponderEliminarGracias y bienvenido! Espero que te sea útil.
ResponderEliminarHola Kaelh
ResponderEliminarEnhorabuena con este tutorial, está todo detallado, por lo menos al leerlo es la sensación que da, al llevarlo a la práctica no sé porque aún sólo estoy informádome :)
Hay una cosa que no me acaba de quedar claro de este tutorial, y es que como al final pone en contrucción, no me queda claro del todo si con los pasos indicados aquí ya estaría acabado el maquinón o faltan aún pasos. Si no me falla la vista en lo que he leído, no he visto ninguna imagen o video del simulador funcionando en real, por eso mi duda si todavía estás completando el tutorial o ya lo das por acabado y listo para que la gente lo pueda seguir.
A mi también me encantan los juegos de coches y sobre todo los simuladores, de hecho ya hice yo mismo algunas cosillas para que jugar sea algo más realista.
El tema es que tras ver tu tutorial, creo que igual se podrían meter las mejoras que indicas aquí en mi estructura, tendría que retocar algunas cosillas pero creo que podría encajar bien. Te mando unas fotos por si tienes curiosidad y quieres darme algún consejo de si se podría adaptar fácilmente o cualquier consejo, como cuanto tiempo te llevó montar todo o lo que sea.
http://prntscr.com/5i4r6z
http://prntscr.com/5i4rb1
http://prntscr.com/5i4re6
http://prntscr.com/5i4rhs
http://prntscr.com/5i4rkk
Saludos y nuevamente enhorabuena.
Juamba
Hola Juamba PH !! Un placer conocerte! :)
EliminarPerdona la tardanza pero estos días estoy fuera de casa y vía móvil no me llegan correctamente los mensajes (emails) muchas veces.-
* La verdad es que en la Guía/blog me centrado sobre todo en la parte más "tosca" que sería la electrónica. De todas formas he dado algunas pinceladas sobre como quedaría en madera y con algunos detalles de la "tornilleria" que pueden ser útiles.-
* En si la "carcasa" del simulador es una fase muy personal y cada uno tiene mas o menos la idea de como le gustaría que se le quedase el simulador... por eso no hice mucho hincapie en ello.
De todas formas todos parten de la idea básica que se ven en las síguientes fotos.
http://4.bp.blogspot.com/-uzlRJueFzH0/U-9-9ftFC3I/AAAAAAAAAIo/7sDTXN0MZps/s1600/DSC_0034.jpg
http://1.bp.blogspot.com/-ekiV6d0ffiY/U--Pvhf80oI/AAAAAAAAAJQ/kV-UlYq5nwQ/s1600/DSC_0031.jpg
- Situación de los motores, las barras, ejes, bielas, posición de los potenciómetros... etc.
- En internet habras visto multitud de terminaciones sobre los "2dof" pero la parte electrónica-mecánica son muy similares.
* En este hilo algunos compañeros ham ido terminado sus proyectos y puedes ver su acabado y como se comporta el simulador. Cada uno adapta su "2dof" a sus necesidades de espacio y gustos. :)
http://www.realovirtual.com/es/foro/topic/3870/simulador-quot-2dof-quot-tu-alcance?page=1
* Lo interesante es que funcionan muy bien estos "2dof" y uno no se gasta mucho dinero. La parte negativa es que hay que lanzarse un poco al proyecto, estar animado y tener algo de paciencia.
Cualquier duda que tengas nos la expones y te ayudaremos sin problemas en lo que podamos.- :)
Un saludo!
PD.
He visto tus fotos y creo que no tendrias demasiados problemas para adaptarlo para un "2dof". Sería algo de bricolage y alguna que otra soldadura. :D
El objetivo sería a groso modo poder extender la estructura por la parte de atras para instalar los dos motores e introducir un eje central para que le de libertad de movimiento al "sillón".
EJEMPLOS:
Modelo clásico.
http://www.isrtv.com/forums/uploads/monthly_08_2013/post-13827-0-29341200-1377424062.jpg
O si te interesa algo mas recogido y que lo "mueva todo"... este es un buen diseño.
http://img15.hostingpics.net/pics/975541cockpitdyn02.png
De todas formas mira el hilo que te comentado, sobre todo en su parte final que existen unos videos en Youtube.
Genial, pues creo que me voy a animar a intentarlo. Ya iré poniendo que tal va el progreso, o las dudas, pero casi mejor por el otro foro
EliminarMuchas gracias
Perfecto, me alegro que te animes!!
EliminarFelices fiestas!
Excelente aporte! Mi más sincera enhorabuena y gratitud Kaelh! Siempre me ha fascinado este mundo y con esta guía tan completa activan las ganas de llevar a cabo un proyecto. Una consulta: se podría adaptar el movimiento desde una Xbox? O no podríamos obtener los parámetros del juego para transformarlos en movimiento? Muchas gracias de nuevo y prometo seguirte! Héctor!
ResponderEliminarGracias Hector!!
ResponderEliminarLamentablemente Xsim, Simtools y similares solo son compatibles para PC.-
Un saludo!!
Muy bien. Gracias Kaelh! Lo suponía, pero mejor asegurarse.
EliminarUn saludo!
Lo primero felicitarte por tu gran trabajo y la paliza de organizar y valorar todas las opciones. Mis simuladores son principalmente para los de vuelo (BMS,DCS,P3D) y me gustaria saber tu opinion sobre el uso de un sistema de 2Dof directo al.soporte de la espalda, sin incluir la parte de pedales, o mejor el.que coje toda.la base?
ResponderEliminarHola Dragun! De nada hombre! :)
ResponderEliminarPara simuladores de aviación en un "2dof" la mejor opcion seria que se mueva todo el conjunto así se simula ese efecto "cabina".-
Un saludo y ánimo! :)
hola muy buen tutorial hace falta gente como tu k no hay casi. mi pregunta es cuanto ruido hace el 2dof??? es silencioso o hay k insonorizar la habitacion?? ejjej. un saludo. cuanto cobras porhacer uno tu completo a encargo??
ResponderEliminarhola felicitarte por este pedazo de tutorial ,tengo un problemilla con el display y es que cargo el perfil del display y el del 2dof y no consigo haser funcionar el display en el juego haver si me puedes echar una mano gracias
ResponderEliminarHola Gaspar y Raul! Un placer conoceros!
ResponderEliminarMe alegro que os pueda servir de ayuda el blog! :)
- El 2DOF no es muy ruidoso.. cuando mas fino seas ajustando los componentes móviles menos ruido hará. Pero en términos generales no es ruidoso.
- Pues por el momento no me dedico a montar por encargo. La idea de mi blog es que "tú puedas hacerlo sin ayuda" ... :) al menos la parte electrónica que es lo más complicado. La estructura ya es más "bricolaje" y al gusto de cada uno al elegir terminaciones y materiales. Cuanto más azucar más dulce. :)
- Con el tema del display habria que ver que placa estas usando .... la TM?¿
- Es importante saber que firmware estas usando. PRILAD? SIRNONAME?
Me alegra saber que aunque con ciertos "contratiempos" al ser un proyecto complejo la gente se va fabricando sus "2dof" por precios razonables.
Un saludo y ánimo!
hola kaelh gracias por respoder, el problema no es el hacermelo yo el problema es no se por donde empezar ya que el tuto es un poco ya para gente mas experta en materia con toda esta peña que te escribe para problemillas pero la gente novata como yo que nunca hemos echo un 2dof pues no sabemos ni por donde agarrar el mango de la sarten jejeje tu tutorial esta genial pero muy salteado y variado y hay es donde se hace todo un nudo, la parte electronica no tengo problem ya que curro en un taller de componentes electronicos y tengo buenos profesionales que me echarian buen cable en el montaje pero tambien andan perdidos a la hora de ver el tuto. de todas maneras te pondria una medalla en lo que tu has puesto porque tutos en spanish asi no hay asi que mi enhrabuena y mas. un saludo
EliminarTe entiendo...
EliminarLeer del tirón el BLOG así de primeras es normal hacerse un lío... es bastante extenso.-
De todas formas el esquema principal no es complicado. La mayoría de los que conozco nunca habían hecho nada igual. Lo importante es centrarse en los componentes; una Arduino, dos ibt2 o una Monster, dos motores, dos potenciómetros, una fuente de alimentación, y elegir entre el FIRMWARE "Prilad o Sirnoname" que será el que introduciremos en la memoria de la Arduino. FInalmente en el PC instalaremos el XSIM V.3 que extrae la telemetria de los juegos. Ese es el "crokis".-
Cuando te pones manos a la obra no es tan comlicado... pero es cierto que habrán contratiempos que con la práctica y "acierto" "error" se irán subsanando. De todas formas cada uno sabe mas o menos si se le da bien el bricolaje, las pequeñas soldaduras... en fin el "bricolage" :) .-
Si te animas ya sabes!
Un saludo!
Hola a todos! me llamo Juanra y soy de Tenerife. Lo primero queria dar las gracias a toda la gente de este foro y de muchos otros que se implican sin conseguir nada a cambio, muchas gracias a kaelh por su pedazo de tutorial. He conseguido hacerlo sin hacer una sola pregunta, solo leyendo e informandome por el foro. Tambien decir que no es nada facil, tengo algun conocimiento de electronica y aun asi fueron tres meses sin parar, noches sin dormir y mucho trabajo. Gracias a mi novia tambien por aguantar mis cabreos jejejeje.. Un saludo y gracias por todo!
ResponderEliminar(VIDEO)
https://www.youtube.com/watch?v=85nabSksyjk&feature=youtu.be
Nano79 » 2 Abr 2015 - 19:05
ResponderEliminarHola a todos.
Lo primero que quiero hacer es agradecer a todos, (mencion especial a Kaelh por la guia) por la la ayuda/paciencia que dan a todos los "ignorantes" como yo, que tenemos ilusion por hacer cosas pero nulos conocimientos.
Lo siguiente , decir que es la primera vez en mi vida que escribo en un foro y lo digo por si cometo algun error de novato: (Ejemplo: no mencionar a tal usuario, escribir en un hilo que no corresponde etc etc...
Ahora voy con la consulta en cuestion:
Basandome en la guia, me interesaria mucho en lugar de fabricarme el 2dof de la guia hacer el 3dof, y mi pregunta es:
- Los firmware Prilad y Sirnoname "aceptan" un 3 motor??
- Que componentes electronicos tendria que añadirle a esta guia??
- Otra placa Arduino?? añadir otra MONSTERs o IBT-2 eso esta claro
- Una fuente de alimentacion mayor ??
- Como serian las conexiones ??
Perdon si me he alargado mucho con el mensaje.
Gracias por adelantado y un saludo
PD: Dados mis conocimientos, a dia de hoy no puedo ayudar a resolver problemas o dudas, pero en cuanto pueda aportar algo positivo lo hare como haceis vosotros
Un saludo
Hola kaelh! Puedo utilizar loas motores que aconsejas ( los que no hace falta aislar de masa) que son a 12v, con una fuente de alimentación de 12v? (Tengo la fuente de hp 12v que indicas en tu guía. Espero respuesta y gracias
ResponderEliminarPerdón me he equivocado, los motores que aconsejas son de 24v y mi fuente es de 12v
ResponderEliminarKaelh, Parabens!! e muito obrigado por voce compartilhar todas estas informacoes e conhecimento com a gente, agora sim! eu vou construir um simulador. completissimo o seu tutorial, valeu d+++ e mais uma vez muito obrigado..
ResponderEliminarDe nada Roberto! :)
EliminarMe alegra saber que te sirvió de ayuda el blog.-
Un saludo!
hola, lo primero excelente post y muy bien hecho, te comento mi problema el tema hardaware esta todo listo, pero cuando encaro los potenciometros, y arranco el X-sim los motores se vuelven locos, cambio la polaridad y siguen igual, cargue el perfil de sirnoname del blog y sigue igual, mi pregunta es teniendo todo encarado al arrancar el x-sim los motores deberian estar en espera hasta que el juego mandara los datos al X-sim ? jejeje estoy atrancado en la fase ultima y me frusta bastante jejejej...un saludo y gracias por el blog
ResponderEliminarExcelente tutorial!! Estoy empezando a armar mi simulador, con una moto monster shield. Te consulto: con una fuente de 46 ampers me alcanza para dos motores de 12v?
ResponderEliminarEs una fuente sentey de pc de 650w reales con 46ampers en el rail de 12v
ResponderEliminarHola! :)
ResponderEliminarCon esa fuente es suficiente.
Gracias Kaelh
EliminarHola Kaelh necesitaría si puedes subir los firm tanto el sirnoname 2013 como el 2014 y el Prilad que están caidos los link de mega. Muchas grcias.
ResponderEliminarHola Kaelh se podria usar controladoras IBT 3? en el caso, como irian conectadas?
ResponderEliminarMuchas gracias, por tu tutorial,un trabajo excelente,me voy a aminar,a seguir tu proyecto.
ResponderEliminarGracias por el manual gente como tu hace mas falta .
ResponderEliminarEnseñar y ayudar a cambio de nada.
Ya tengo casi acabado el simulador.
hola que tal hermoso proyecto, se podria usar el l298, de ser asi las conexiones como serian?
ResponderEliminarKAELH, yo creo q muchos te estamos agradecidos....bien podías poner una cuenta de paypal con un DONATE bien grande ¡¡
ResponderEliminarhola buenas.seguiendo este maravilloso tuto me e construido un 3dof y me gustaria presentarme y enseñaros my simulador.foro o algo¿
ResponderEliminar¡Hola!
ResponderEliminarQueria saber si podias darme especificaciones sobre como acoplar los potenciometros a los motores, especificamente para unos motores tipo "VALEO". Necesitaria saber bien que materiales necesito y una guia paso a paso sobre como acoplarlos, que me esta volviendo loco ese tema.
Muchas gracias de antemano.
Hola!!! Que capacidad de kilos tiene ese 2DOF?? Es decir podria con un adulto sin problemas??? He visto por la red muchos que hablan de 12v hasta menos de 100kg y con 24 que pasan de 200kg.
ResponderEliminarUn saludo
y varias dudas mas jajajaj.
Eliminar1.- La primera fuente de hp no la pones en paralelo con otra, eso quiere decir que con una valdria para mover motores de 24v??
2.- La fuente de alimentacion de pc valdria tambien para motores de 24 voltios??
3.- Los motores de desguace son siempre de 12 voltios no?? Cuales serian los de 24???
Un saludo crack
Mi mas sincera enhorabuena por este tutorial, es genial y sencillo.Gracias por ponerlo tan facil. Yo por mi parte ya he hechado andar mi prototipo con el firmware sirnoname 2014 y potenciometros hall con el x-sim. Tengo una duda, quiero probarlo tambien con el simtools, sin exito aun¿Es compatible? ¿si lo es hay que hacer algo especial en la configuracion? gracias de antemano
ResponderEliminarHola hermano. Me podrías dar una mano? Estoy a punto de comprar todo para hacerlo pero veo que no está muy activo el postre y tengo miedo de quedarme con 2 motores y la fuente en la mano sin andar
EliminarHola hermano. Me podrías dar una mano? Estoy a punto de comprar todo para hacerlo pero veo que no está muy activo el postre y tengo miedo de quedarme con 2 motores y la fuente en la mano sin andar
Eliminar
ResponderEliminarSWF VALEO NIDEC ITT 404.458 GEAR MOTOR 24V DC
porque si me pide q sea un motor de 12 v me recomienda este de 24 perdona por mi falta de conocimiento no se cual comprar y porq
hola amigo paso por tu blogge por q necesito ayuda estoy en el proyecto de un simulador tengo un puente l298n la tarjeta arduino uno china y pues ya e hecho todos los pasos pero inicio los programas de x sim y no me da resultados por fa si alguien me puede ayudar gracias mi correo es victoralfonso252013@gmail.com
ResponderEliminarParece una oferta muy interesante para personas que aman la conducción así como para personas que quieran empezar a conducir. Seguro que en unos años en las autoescuelas tenemos estos simuladores para ayudar a los alumanos, un saludo
ResponderEliminarhey que tal estimado kaelh, mira estab queriendo configurar con eso de los potenciometros para delimitar sus maximos y minimos pero en el xpid cuando pongo lo de activar la grafica me sale un error y se cierra el converter, una cosa mas para configurar tengo que tener conectado todo con la monster arduino motores y potenciometros, o solo basta con la arduino y los potenciometros. Un saludo amigo y gracias por tu aporte de esta guia muy indispensable, te rocomendaria que pusieras mas paso a paso como configurar los mecanismos de los motores/potenciomtros con el xsim para tener mas claro el funcionamiento y no perdernos en la activacion. Saludos.
ResponderEliminarHola. Alguien que tenga un esquema o foto detallado con las conexiones? Ya tengo toda la electronica (Arduino+Moster Shield+potenciometros+motores) y quisiera probarlo todo antes. Gracias! Un saludo.
ResponderEliminarHola yo estoy muy interesado pero no hay mucha ayuda en español. Pudiste hacer algo me encantaría empezar con esto pero sin ayuda me da cosa gastar todo el dinero y que quede hay sin andar
Eliminarque tal
EliminarLas conexiones están aí en la información del blog o cuáles son las que quieres?
Nadie?!
ResponderEliminarYo estoy trabajando en este proyecto pero de otra manera, estudio ingeniería en electrónica en el instituto Tecnológico de Nuevo Laredo, de manera que estoy creando mi propio programa y programación para conectar este directamente al Xbox 360 y Xbox one.
ResponderEliminarEstoy utilizando los monster moto shield, motores de parabrisas, Arduino etc igual que aquí pero en los motores utilizo un encoder transforme mi motor DC a un servomotor es el principio del PID O CONTROL de posición de esta manera no tengo que correr el juego en PC sino que trabaja de manera independiente del ordenador, digamos que el asiento de mueve sin necesidad de estar jugando, de esta manera uso un control de Xbox one (también trabaja en Xbox 360) con las señales que le envío al control también las envío al Arduino la programación traduce está información y dependiendo de lo que pasa con el volante, pedales, freno de mano, palanca de cambios etc el asiento de mueve de una manera específica.
En conclusión cree un control digital total mente independiente de una computadora. (1 año 3 meses de trabajo en el proyecto después logré el resultado esperado) saludos y gracias por la información me sirvió un poco de ella
Saludos, oye como comentaste hiciste el programa para xbox si te funciono lo tienes funcionando?
Eliminarnadie yo quiero hacer un proyecto asi
ResponderEliminaralguien podrá decirme donde encontrar juegos de tractores para android
ResponderEliminarMuy buen material.
ResponderEliminarGracias por compartir
Muy buenas a todos, lo primero dar las gracias por compartir conocimientos de esta manera, porque tiene un buen curro la pagina. Bueno voy al grano, llevo un tiempo con un cockpit que me fabriqué yo mismo y como no podía ser de otra manera, cada vez van más cositas las que le voy montando, el otro día mirando foros de simulación encontré la palabra clave (ARDUINO)y me puse a investigar a ver que coño era eso y cual fue mi sorpresa? (COÑO ESA MIERDA SIRVE PARA TODO) bueno pues le he regalado a mi sobrino uno que es un cochecito con sensores y toda la parafernalia (UNA PASADA) y como no podía ser de otra manera yo me voy a pillar otro para mi simulador, voy a empezar con las lucecitas de revoluciones, marchas, etc... y en esta pagina que te has currao me has abierto los ojos de como empezar (GRACIAS. Bueno me despido con un hasta luego, porque seguro que tendré que pedir información y consejos. LO DICHO, MUCHISIMAS GRACIAS POR COMPARTIR SABIDURÍA, y nos vemos por los circuitos.
ResponderEliminarSOLO DARTE LAS GRACIAS.
ResponderEliminarinteresante proyecto estimado pero me gustaria contactarme contigo porque yo tambien estoy realizando un proyecto similiar y quisiera algunas asesorias para cualquier cosa le dejo mis siguientes datos
ResponderEliminarcorreo: ciertovegajuan@gmail.com
red social: manuelvega
espero su pronta respuesta.
amigo muchas fotos e imagenes que subiste en el post ya no estan, pudieras resubirlas porfa para ver bien todo :) gracias de verdad por tu aporte
ResponderEliminarwow!
ResponderEliminarBuenas tardes KAELH
ResponderEliminarVeo que hace tres años que no respondes. En todo caso.... mi más sincera enhorabuena por este BLOG tuyo, y por tu dedicación altruista.
Tras verlo me decidí a montar un simulador como este para el proyecto del año que viene, de modo que llevo desde final de este curso y de momento todo lo que llevamos de verano apretando duro.
He leído y releído el blog tuyo así como los foros de internet, pero me encuentro estancado:
Actualmente estoy usando un sólo ordenador (Aunque creo recordar que por ahí se comenta que es mejor el uso de dos ordenadores). ¿Qué opinas al respecto?
Por otro lado, el ordenador/-es utilizan windows10, loq ue temoq ue es otro handicap. En todo caso estoy trabajando con la versión "no estable" de X-SIM.
Y finalmebnte, cuando conecto el extractor y el conversor (Cosa que tarda en arrancar como 10 minutos de reloj), pone que está conectado en local, pero no aparece ninguna IP. Los valores en conversor/ input setup correspondientes al giro del volante, acelerador y demás sí fluctuan, pero los de las fuerzas de aceleracion longitudinal y lateral están permanentemente en 0.0000 y no sale la barrita lateral. Creo que esto es porque no hay conexión, pero tengo dudas.
He probado con tu profile y con el de sirnoname, pero nada tio!
Crees que puedes contactar de algún modo conmigo? (O alguien que tenga o haya tenido el mismo problema). quizás con colaboración pueda avanzar y prestar mi apoyo después a los demás.
Mi más sincera enhorabuena en todo caso.
Andrés: andresaguadop@gmail.com
hola muy buenas a todos
ResponderEliminarPrimero quiero dar las gracias por el gran proyecto que realizaron, la verdad es increíble que podáis dedicar tanto tiempo a este gran proyecto sin recibir nada a cambio........ de verdad muchas gracias por todo.....
tengo una duda he estado investigando por Internet para localizar alguna solución de la comunicación por telemtria del American Truck Simulator..... pero la verdad lo poco que he encontrado.... es incorrecto o muy confuso la verdad...... por casualidad alguno de ustedes ha podido conectar para recibir información del juego.....
Muchas gracias y que tengáis un gran día
es posible que vuelvas aponer los enlaces de descarga?estan todas caidas. gracias
ResponderEliminarOlvídate! Pero no te das cuenta que lleva 6 años la página sin actualizar?! Este blog, lleva años muerto e inactivo! Yo por suerte, tengo mi simulador funcionando, pero me busque la vida por mis propios medios...aquí, el “autor” dejo de responder hace años, por lo visto, le agobiaban y acribillaban a preguntas...
EliminarLo que tenía que hacer es retirar el blog de la red...😏
ResponderEliminarBuenas acabo de leer q el blog y claro falta info sabría alguien como recuperarla o otro enlace porq empecé a mangar y me qde parado
ResponderEliminarSaludos
Empecé a mangar no empecé a montar 🤣🤣 tengo muchas dudas sobre el cableado 🤦♂️🤦♂️
ResponderEliminarBuenas no si alguien puede ayudar en todo este tinglado pero dejo mi cordero por si tengo suerte saludos
EliminarBretasuzuki@hotmail.com
Este comentario ha sido eliminado por un administrador del blog.
ResponderEliminarEste comentario ha sido eliminado por un administrador del blog.
ResponderEliminarEste comentario ha sido eliminado por un administrador del blog.
ResponderEliminarEste comentario ha sido eliminado por un administrador del blog.
ResponderEliminarHola, creo que es oficial, x-sim ha muerto
ResponderEliminar